This information is part of the Business Simulation Library (BSL). Please support this work and ► donate.
In 2007 Erik J.A. van Zijderveld introduced what he coined a "Method to Analyse Relations between Variables using Enriched Loops (MARVEL)" [24]. He made the following observations:
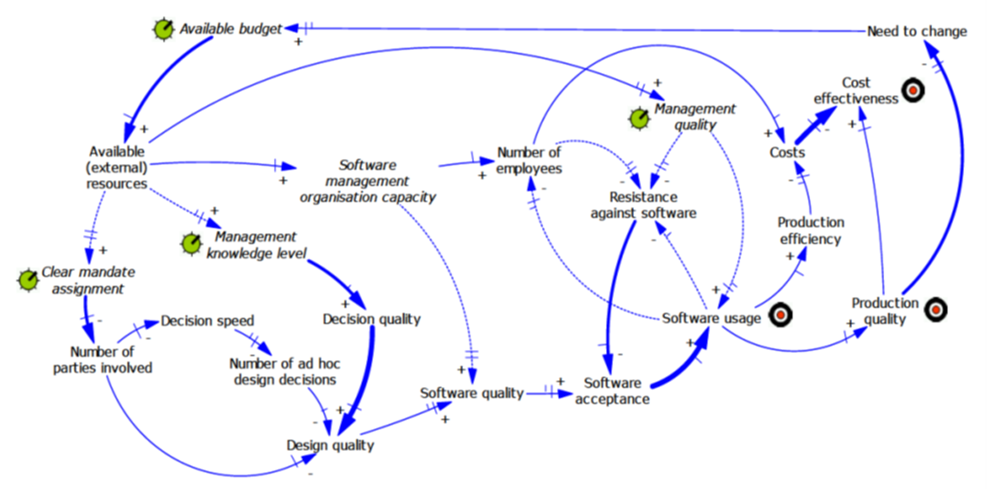 |
In the diagram, the thickness of an arrow indicates the strengh of impact whereas length and number of "barriers" at their tips indicate the speed of impact propagation. These attributes are assigned qualitatively using weak, average, strong, very strong to rank strengths and low, average, high, very high to rank speeds.
The model diagram below illustrates how such a model can be
built using the →CausalLoop
package. Impact relations between variables are encoded using the
→ProportionalityDelayed
component with global parameters for strength (wk,
av, st, vs) and speed (v1, v2, v3, v4)
in place, the latter being transformed to delay times,
which are inversely related to speed.
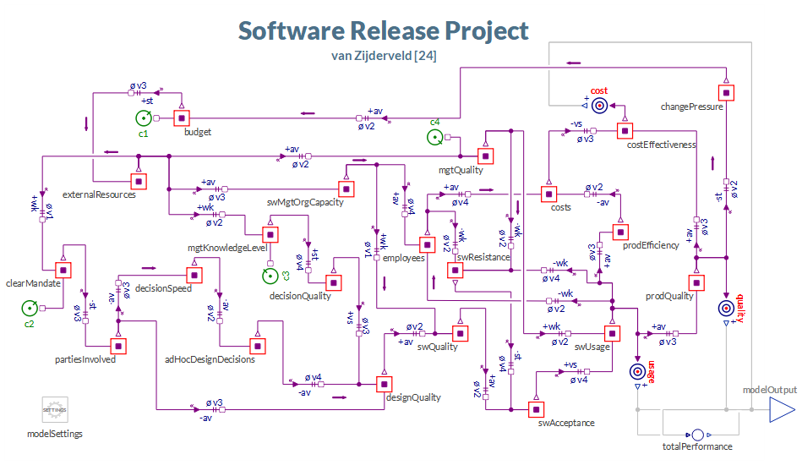 |
In accordance with the MARVEL version there are four control or intervention points, which can be turned on or off for a simulation run:
c1 : budget control with setpoint =
0.8c2 : mandate control with setpoint =
0.7c3 : management knowledge level control with
setpoint = 0.5c4 : management quality control with
setpoint = 0.6These controls mean that whenever there is a deviation between
setpoint and actual level of the variable under
control, then corrective action will be taken, i.e. a flow to the
stock, in order to erradicate the deviation within the chosen
adjustment time, whcih is set to 1 yr for all
controls.
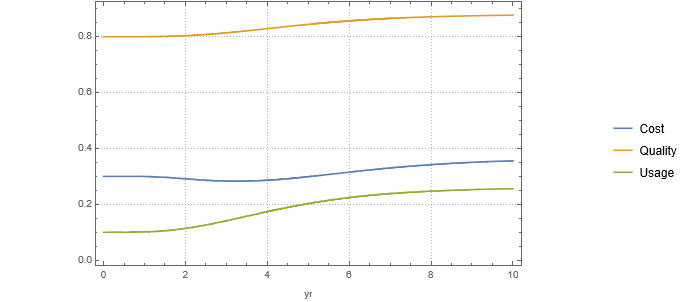
There are three main performance goals: cost
effectiveness (costs), production quality
(quality), and software usage (usage). In this
example the normalized stock values pertaining to the goals are
simply mapped upon the linear scale [0,1]. The graph
blow shows the development for these performance indicators over a
period of 10 years with just the budget control (c1)
activated.
 |
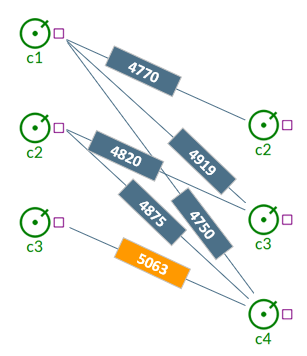
In order to better combare different scenarios we can use a
weighted average performance and calculate the mean over
the simulation period (→totalPerformance).
Using this measure we can compare different combinations of
interventions and it turns out that a combination of
c3 and c4 shows best average performance
albeit withouth considering the control effort (see Notes).
 |
| Name | Description |
|---|---|
| Structural parameters | |
|
|
Weighted average performance per period |