This is an idealized torque controlled electric machine model. The actual torque of the electric machine can be adjusted by means of the signal input.
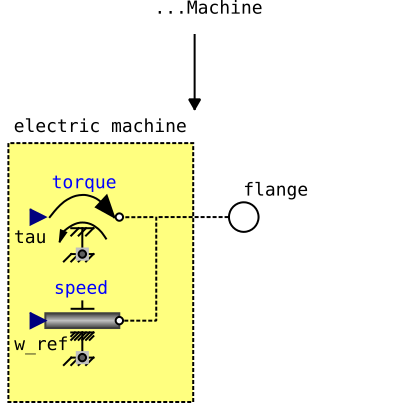
Fig. 1: Principle of controlled machine model without gear
The following variables are calculated in the model
aMachine = angular acceleration of machinephiMachine = mechanical angle of machinewMachine = angular velocity of machinetauMachine = (electrical) torque of machinepowerMachine = power of machineThis machine model considers the following effect:
tauLimit for
w ≤ wBasewBasewBase/w for w
> wBase