In this chapter is explained how to use the fault models. This will be done using using an example of a driveline. In this example, a boolean parameter fault that models a driveline breakage, and a variable real fault, leading to increased friction.
In Figure 1. the driveline of a rotational actuator is shown. Three triggerable faults can be identified:
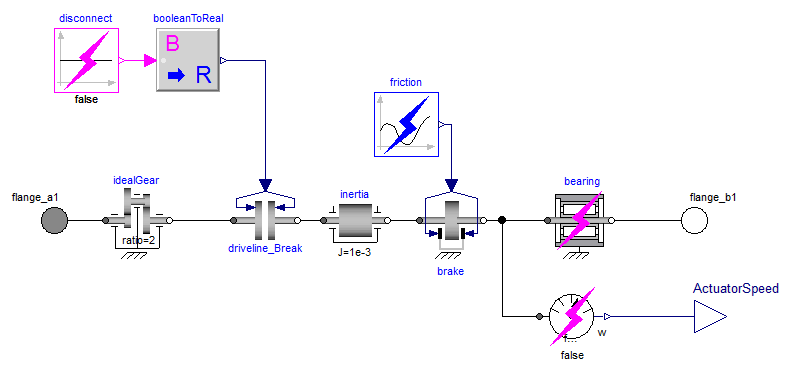
Figure 1. Drivetrain Model
How to implement the faults will be explained below. have a look at the chapter: Parameter and Variable Faults
A Boolean parameter fault can be modelled by using the FaultTriggering.FaultOutput.ConstantBooleanFault model and connecting it to the input of the fault case. In this case the boolean to real converter outputs 1 in case that the fault is false, and 0 otherwise. This engages or disconnects the driveline by disconnecting a clutch.
In the boolean parameter value block, it is possible to turn the fault on or off (default=off). IMPORTANT: Note that using an parameter to set the faults can lead to problems. See chapter "Important" for an explanation.
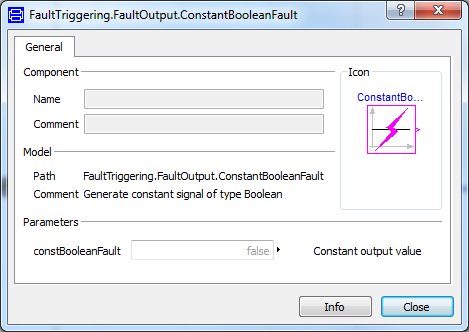
Figure 2. User interface of the Boolean parameter fault block.
The variable faults are handled just like parameter faults. In Figure 1 the DriveFriction is modelled with a real variable fault which is connected to a brake element.
The fault model can be configured by the user (see Figure 3). Unlike the Parameter Fault where only the default value can be set, it is possible to set the record externalRealFault (see Figure 4). In this record three parameters must be set; The boolean externalFaultOn is used to switch the input from the global Faulttriggering on or off. This makes it possible to use the predefined default value without using the global model. The optional integer paramter faultMode can be used by advanced users to automatically reconfigure models. This reconfiguration is handled in the chapter Automatic Model Reconfiguration. In the "advanced" tab the parameter faultIndex, which indicates which output channel of the global model FaultTrigger is used. This should not be set by the user unless for debugging purposes or experienced users.
IMPORTANT: Note that using an parameter to set the faults can lead to problems. See chapter "Important" for an explanation!
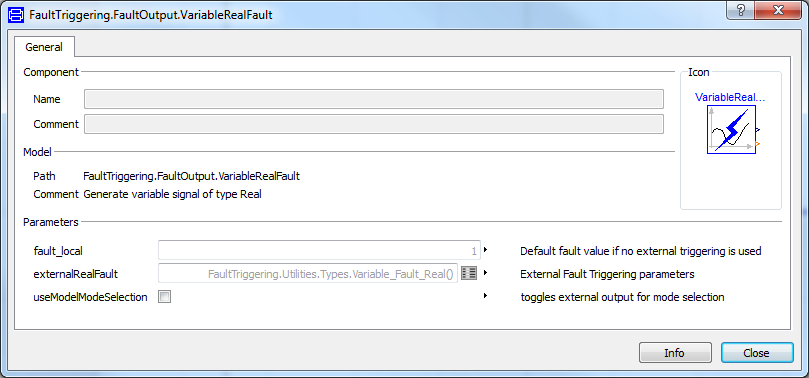
Figure 3. User interface of a Real variable fault block.
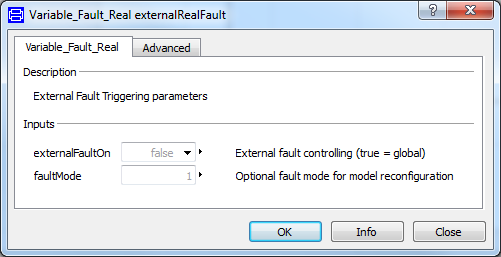
Figure 4. Record ExternalFault.
Using the models in the package FaultTriggering.FaultOutput.Internal, it is possible to create broken models by using the "extends" functionality. An example of this possibility can be found in the sensor model FaultTriggering.Examples.MotorExample.FaultSpeedSensor
| Copyright © 2012-2015, DLR Institute of System Dynamics and Control |