Velocity control of an electric engine with Automatic Tuning
Description
Velocity control of an electric engine with a PI
controller.
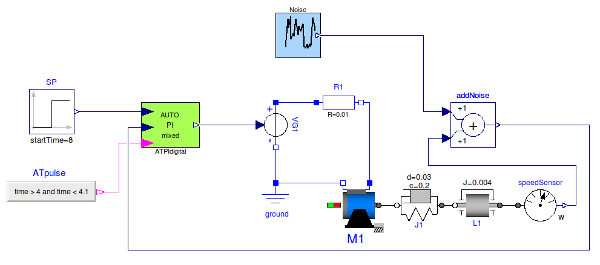
The PI controller regulates the voltage source of the electric
engine, and measures its angular velocity (corrupted by noise). The
aim of this example is to show how a controller with Automatic
Tuning can be used in a real context.
In the following table are listed the controller parameters before
and after the Automatic tuning
| Parameter |
Before |
After AT |
| Kp |
0.2 |
0.5167 |
| Ti |
0.5 |
0.1399 |
Automatic Tuning algorithm parameters
| Parameter |
Value |
| slope |
5 |
| PermOxPeriodPerc |
5 |
| pm |
70 |
| nOxMin |
3 |
The figure below show the velocity set point, the measured process
variable and the control signal, that is limited between 0 and 24
V. 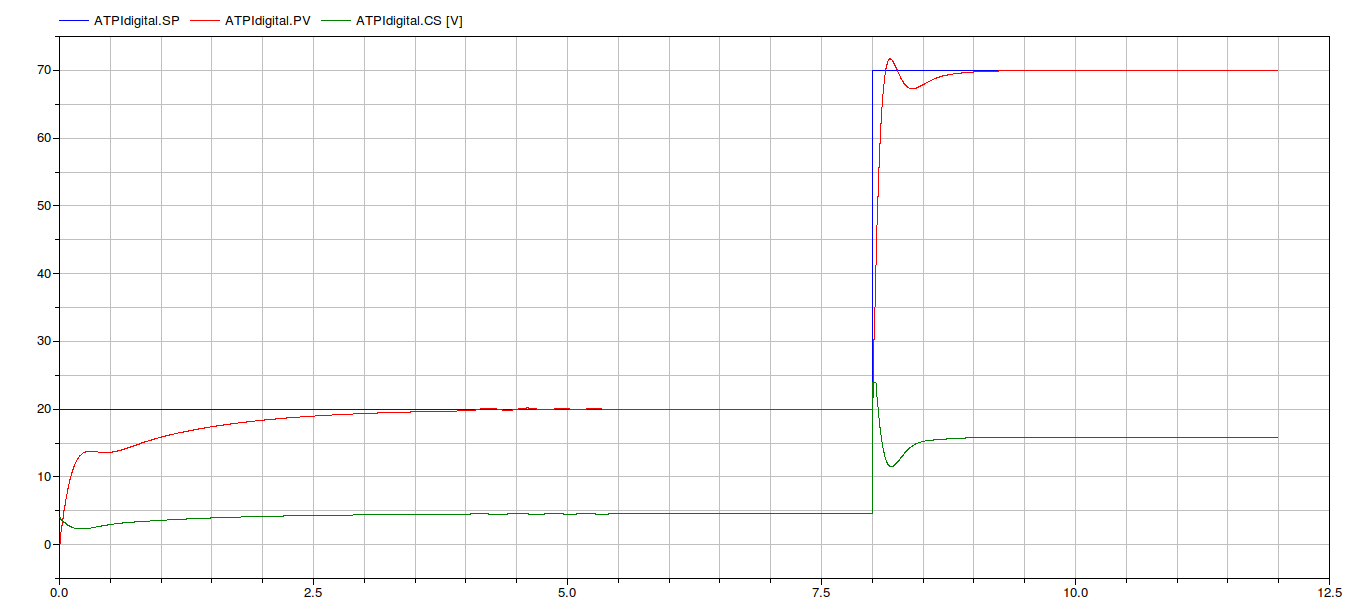
References
For more information please refers to the following paper:
Efficient hybrid simulation of autotuning PI
controllers
Alberto Leva, Marco Bonvini
8th Modelica Conference, Dresden, Germany
march 20-22, 2011
- Industrial Control Systems (v 1.0.0) : April-May 2012
-
- List of revisions:
-
- 11 May 2012 (author: Marco Bonvini)
- Main Authors:
- Marco Bonvini; <bonvini@elet.polimi.it>
- Alberto Leva <leva@elet.polimi.it>
- Politecnico di Milano
- Dipartimento di Elettronica e Informazione
- Via Ponzio 34/5
- 20133 Milano - ITALIA -
- Copyright:
- Copyright © 2010-2012, Marco Bonvini and Alberto
Leva.
- The IndustrialControlSystems package is free
software; it can be redistributed and/or modified under the terms
of the Modelica license.
Generated at 2026-07-21T20:30:55Z by OpenModelicaOpenModelica 1.27.0 using
GenerateDoc.mos