StateSpace.Plot.step(ss); or StateSpace.Plot.step( ss, dt, tSpan, x0, defaultDiagram=Modelica_LinearSystems2.Internal.DefaultDiagramTimeResponse(), device=Modelica_LinearSystems2.Utilities.Plot.Records.Device())
This function plots the step responses of a state space system for each system corresponding to the transition matrix. It is based on timeResponse.
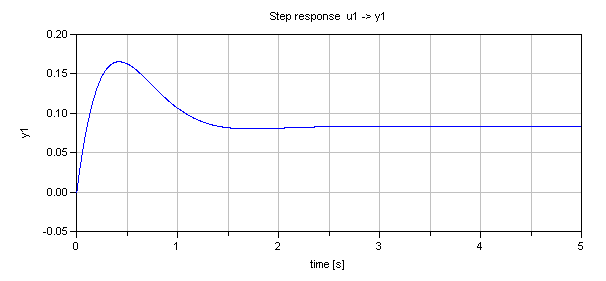
Modelica_LinearSystems2.StateSpace ss=Modelica_LinearSystems2.StateSpace(
A=[-1.0,0.0,0.0; 0.0,-2.0,3.0; 0.0,-2.0,-3.0],
B=[1.0; 1.0; 0.0],
C=[0.0,1.0,1.0],
D=[0.0])
algorithm
Modelica_LinearSystems2.StateSpace.Plot.step(ss, tSpan=3)
// gives:
impulse, ramp, initialResponse
encapsulated function step
import Modelica;
import Modelica_LinearSystems2;
import Modelica_LinearSystems2.StateSpace;
import Modelica_LinearSystems2.Utilities.Types.TimeResponse;
input StateSpace ss "State space system";
input Modelica.Units.SI.Time dt = 0 "Sample time";
input Modelica.Units.SI.Time tSpan = 0 "Simulation time span";
input Real x0[size(ss.A, 1)] = zeros(size(ss.A, 1)) "Initial state vector";
input Boolean subPlots = true "True, if all subsystem time responses are plotted in one window with subplots" annotation(
Dialog,
choices(checkBox = true));
extends Modelica_LinearSystems2.Internal.PartialPlotFunctionMIMO(defaultDiagram = Modelica_LinearSystems2.Internal.DefaultDiagramTimeResponse(heading = "Step response"));
input TimeResponse response = TimeResponse.Step "type of time response";
end step;