DC Motor
General
This is the model of a permanent magnet DC motor, one of the
most common electromechanical actuator with caractheristics as low
inductance and low friction. It includes dead zone.
Implementation
DCMotor is based upon the mathematical model of a
permanent magnet dc motor. It is similar to the IdealDCMotor
class but this model is nonlinear. A dead zone is added by using
the static friction of
BearingFriction component.
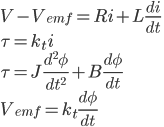
Using elements from MSL the model
was developed to represent the mathematical equations:
Notes
- The behavior of the voltage source is given by a real
input (for example a real source block could be connected
as an input, see Modelica.Blocks.Sources
).
- This model is linear
- All the parameters and variables are in SI units
- Has angle and speed sensors as real outputs
.
Generated at 2026-07-26T20:40:21Z by OpenModelicaOpenModelica 1.27.0 using
GenerateDoc.mos