In this model the trayectory tracking for PR servomechanisms is tested using PID block and signal DC motor.
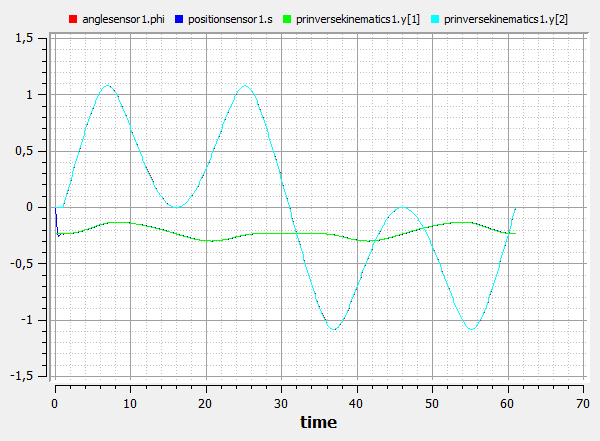
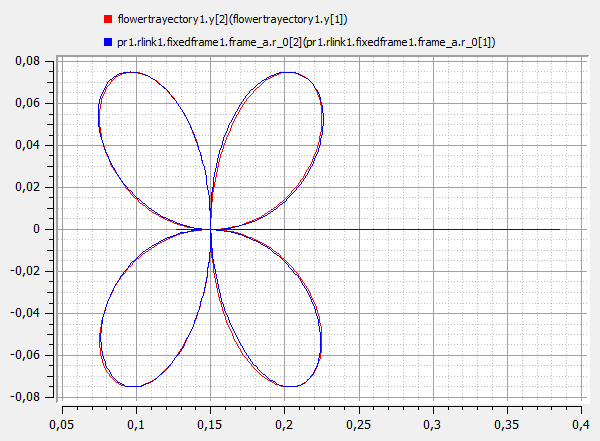
Results: