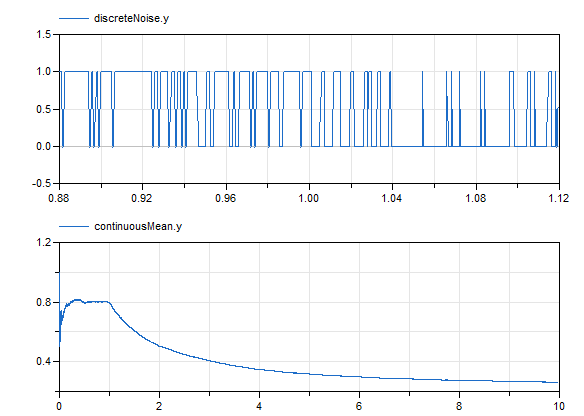
This example shows, how the distribution parameters can vary during the simulation. Noise is generated with a discrete distribution: 1 will be drawn 80 % of the time and 0 will be drawn 20 % of the time. After 1 s of simulation, the probabilities are exchanged. This can be seen in the random numbers generated, as well as in the mean estimation:
| Copyright © DLR
Institute of System Dynamics and Control Initial version implemented by A. Klöckner, F. v.d. Linden, D. Zimmer, M. Otter. DLR Institute of System Dynamics and Control |