This example is similar to Buildings.Fluid.HydronicConfigurations.ActiveNetworks.Examples.Decoupling except that an alternative control logic is implemented, based on the measurement of the return temperature in the consumer circuit and in the primary branch.
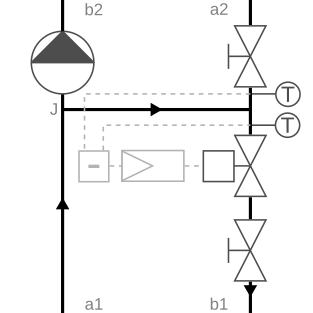
This control logic intends to keep constant the difference
between those two measurements. Considering that we have:
T1, ret - T2, ret = (ṁ1 -
ṁ2) / ṁ1 * (T1, sup - T2,
ret), the control objective can be expressed based on the
set point ΔTset and the consumer circuit
temperature differential ΔT2 (ΔT2 =
T2, sup - T2, ret = T1, sup -
T2, ret) as: ΔTset = (ṁ1 -
ṁ2) / ṁ1 * ΔT2. For consumer
circuits that have a temperature differential relatively constant
(see for instance
Buildings.Fluid.HydronicConfigurations.ActiveNetworks.Examples.ThrottleOpenLoop),
the control logic will thus maintain a nearly constant fraction of
primary flow recirculation. However, at very low load if
ΔT2 value drops (due for instance to a secondary
flow recirculation ensuring a minimum flow for the secondary pump)
the control valve will be fully open, and the primary pump speed
potentially maxed out, trying to compensate for the vanishing
ΔT2. In other words, taking the example of a
heating circuit, at low load the control logic cannot infer that
the low value of T1, ret - T2, ret is
due to a consumer circuit return temperature that is too high (as
it tends towards the supply temperature). It will work under the
assumption that T1, ret is too low, and open the
control valve to try and increase the primary flow recirculation.
This flawed control is showcased in this example when the parameter
is_cor is set to false (the default), see
plots #1 and #2 between 14 and 16 h.
Now setting is_cor to true, a
correction is used to counteract this low load effect by limiting
the set point to the consumer circuit temperature differential
ΔT2. Note that the implementation of that
correction is specific to a change-over operation and needs to be
adapted for heating-only or cooling-only applications.