This information is part of the Business Simulation Library (BSL). Please support this work and ► donate.
This component uses a →PID
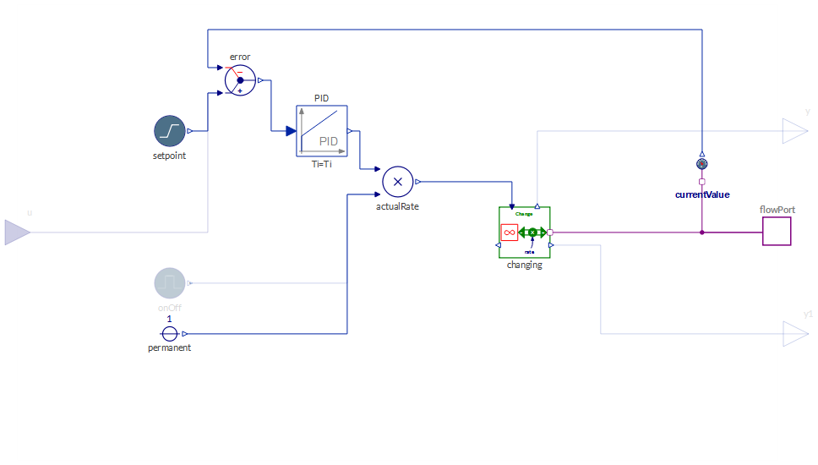
controller to arrive at a rate of flow that is needed to move a
connected stock "under management" to a given setpoint,
i.e., goal. The PID controller here follows the typical
standard form implementation where the error e(t)
is defined as the difference between the setpoint SP(t)
and the current stock value S(t): e(t) = SP(t) -
S(t). The control u(t) accordingly is the rate
affecting the stock:

There is proportional control k
e(t) that is immediately acting upon any deviation between
stock value and setpoint. The controller also has an
integral component that is aiming at
correcting the accumulated error within a time span of
Ti units of time. Finally, the controller has a
derivative component that uses the
current rate of change in the error to predict the error
Td units of time into the future.
The control's setpoint can be provided either by an
embedded →RampInput
or by an exogenous input u. In case of a ramp
input the setpoint will move from initialSetpoint
to finalSetpoint in linear fashion for a period given
by duration starting at startTime.
The controller by default is active over the whole simulation
run, but can be restricted to an on-off period using
tc = TimingChoices.period and the parameters
onTime and offTime.
 |
SimpleControl, InputControl, PID
| Name | Description |
|---|---|
| Type choice for controller gain |