Some models in this package use interactive user input thanks to
features from the Modelica_DeviceDrivers library
and/or DLR's Visualization library. Their output can
be controlled by keyboard or joystick.
Note that the example ModuleTest_NoInput, as its
name indicates, has no input and runs as regular simulation. This
is left for reference for the user's developers to understand the
differences between a regular example (no interaction) and the
other two examples.
The following summarizes how the examples should be run:
If you do NOT have a license for DLR's
Visualization library, you can run the example
ModuleTest_Dymola, which has preconfigured keyboard
inputs. To see your changes in real-time, you must select the the
Simulation ribbon, which is synced with real-time. While a
simulation is running, open a plot window and select the variables
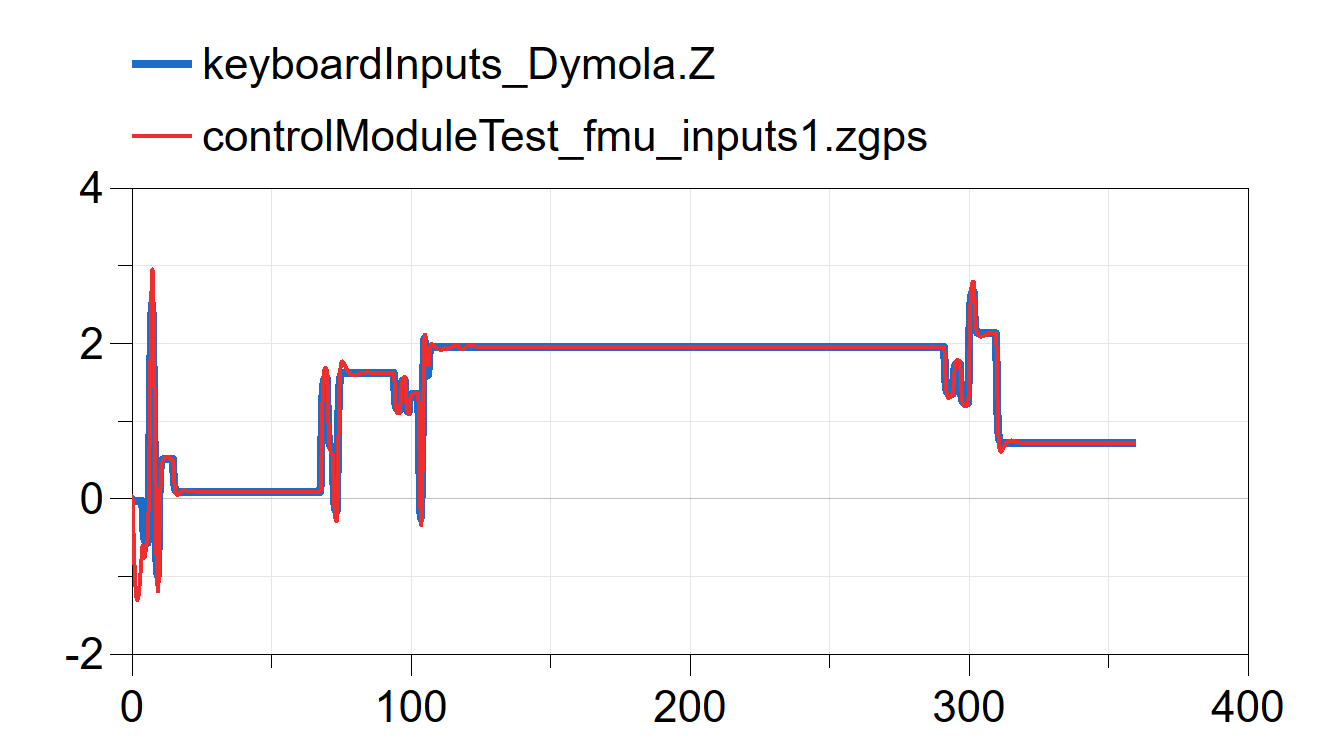
to monitor. For example, as shown below, one could monitor the
height by monitoring the keyboard input for the Z-coordinate by
plotting keyboardInputs_Dymola.Z and the corresponding
sensor signal controlModuleTest_fmu_inputs1.zgps.
If you have a Professional Edition license for DLR's
Visualization library, you can run the example
ModuleTestSimVis. Follow the instructions from the
library on how to run models that use this library.
To obtain a license, see: https://visualization.ltx.de/
When using the Community Edition version of DLR's
Visualization library, one of the cameras in the model
would need to be removed.
ModuleTest_DymolaThe image below shows a running simulation of the model
ModuleTest_Dymola. The blue line shows the command
issued from the keyboard, while the red line the model's
response.