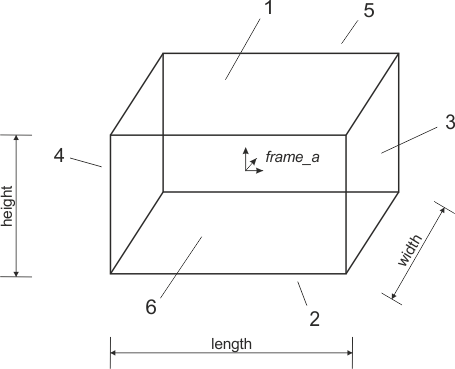
This model defines a cuboid body that can collide with every surface. Contact surfaces can be enabled seperately. The enumeration corresponds to the chosen directions and dimensions and is displayed in the Figure.