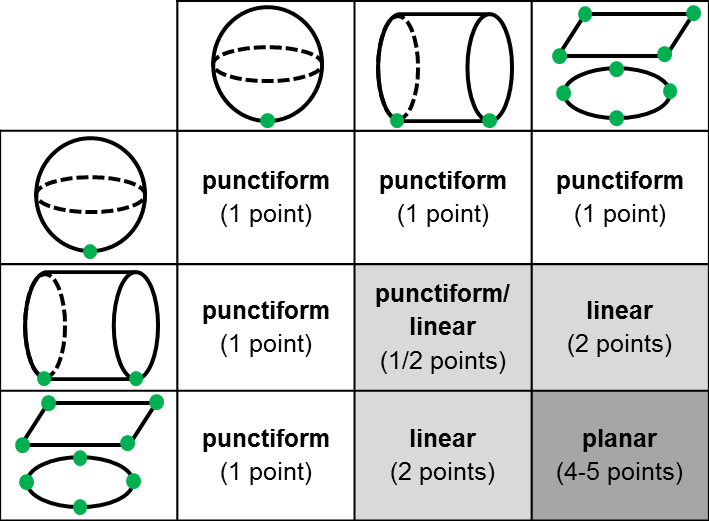
To describe elementary contact surfaces, the library provides ready-to-use blocks. The surface definition represents a thin and massless layer, which can be connected to any kind of rigid body by a frame connector. The dimensions of the surface can be parameterized. In order to be able to use the dimensions in the contact block we introduce a new interface to connect the surface definition with a contact block. The figure shows the resulting shape of the contact area for all possible combinations, as well as the number of contact points to describe it.