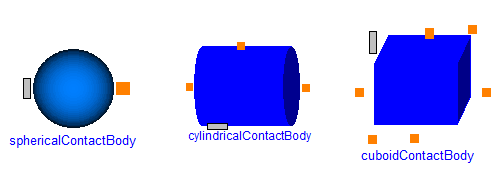
The library includes predefined, elementary bodies like cuboids or cylinders which combine several contact surfaces and include a Multibody block. Each contact surface can be enabled seperately. These do contain masses and moments of inertia, which are calculated by the dimensions and the density of the material. The Figure displays the ElementaryContactBodies that are currently available.