PI control of typical processes, with automatic tuning
Description
In this examples the typical processes (contained in model
TypicalTF ) are controlled with PI regulators with automatic
tuning. The aim of this example is to show how the automatic tuning
algorithm works with varius processes. For each trasfer function
taken into account have been compared the parameter values before
and after the tuning. Also the algorith parameters are listed too.
It is possible to see that they have different values, depending on
the considered example (e.g. the slope must be adapted in order to
avoid big oscillations, the percentual tolerance have to be adapted
if the period of the oscillation changes,...).
The example is made of three phases:
- Set point following with default parameters,
- Automatic tuning,
- Set point following with the tuned parameters.
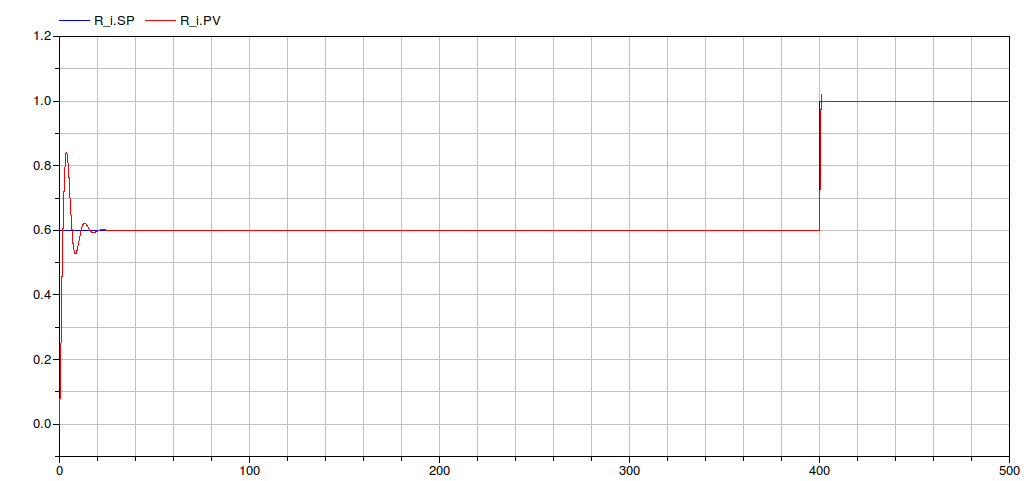
Process Trasfer function
| Integrator |
Y(s) 1
---- = -----
U(s) 5s |
Controller parameters
| Parameter |
Before |
After AT |
| Kp |
5 |
73.4625 |
| Ti |
1 |
0.273 |
Automatic Tuning algorithm parameters
| Parameter |
Value |
| slope |
1 |
| PermOxPeriodPerc |
5 |
| pm |
65 |
| nOxMin |
3 |
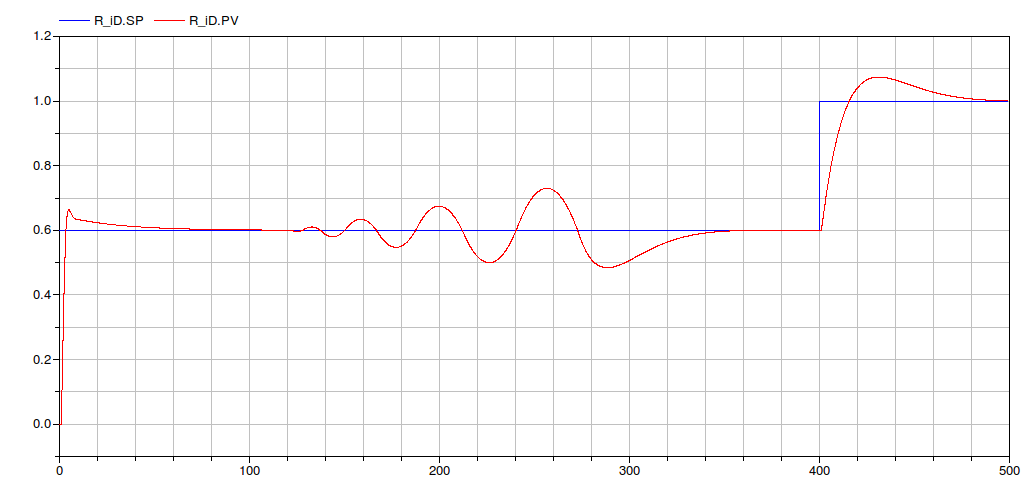
Process Trasfer function
| Integrator + delay |
Y(s) 1 -1s
---- = ----- e
U(s) 5s |
Controller parameters
| Parameter |
Before |
After AT |
| Kp |
5 |
1.067 |
| Ti |
30 |
26.54 |
Automatic Tuning algorithm parameters
| Parameter |
Value |
| slope |
0.01 |
| PermOxPeriodPerc |
30 |
| pm |
70 |
| nOxMin |
3 |
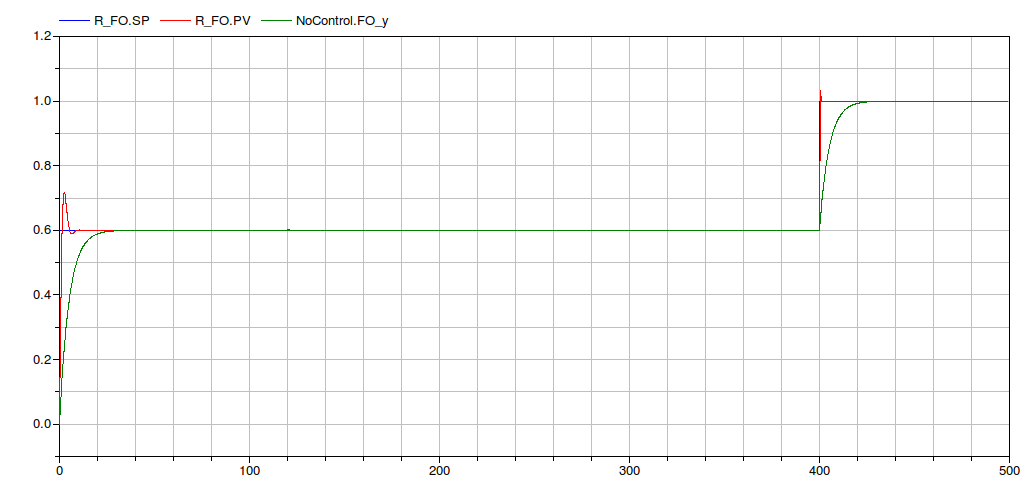
Process Trasfer function
| First Order |
Y(s) 1
---- = --------
U(s) 1 + 5s |
Controller parameters
| Parameter |
Before |
After AT |
| Kp |
5 |
71.5948 |
| Ti |
1 |
0.1365 |
Automatic Tuning algorithm parameters
| Parameter |
Value |
| slope |
1 |
| PermOxPeriodPerc |
5 |
| pm |
65 |
| nOxMin |
3 |
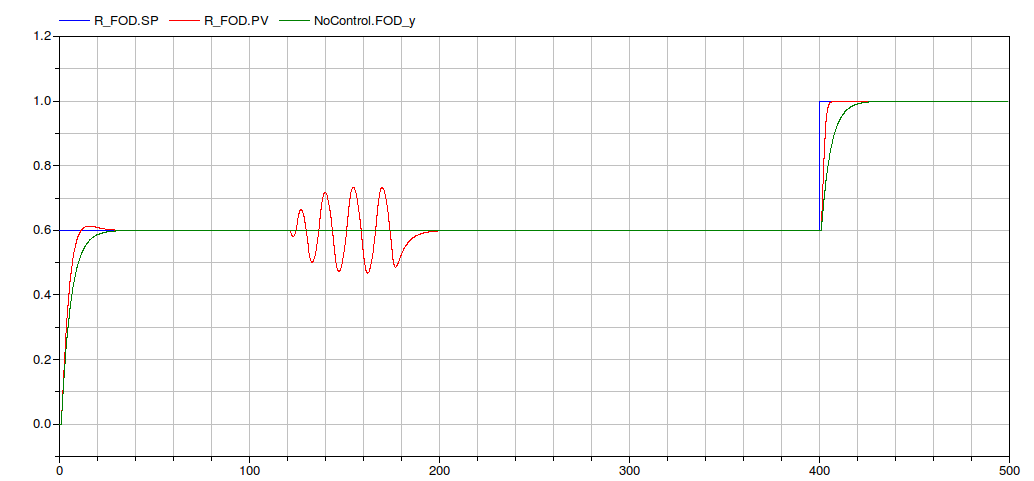
Process Trasfer function
| First Order + delay |
Y(s) 1 -2s
---- = -------- e
U(s) 1 + 5s |
Controller parameters
| Parameter |
Before |
After AT |
| Kp |
1 |
2.11 |
| Ti |
4 |
5.1879 |
Automatic Tuning algorithm parameters
| Parameter |
Value |
| slope |
0.1 |
| PermOxPeriodPerc |
5 |
| pm |
65 |
| nOxMin |
3 |
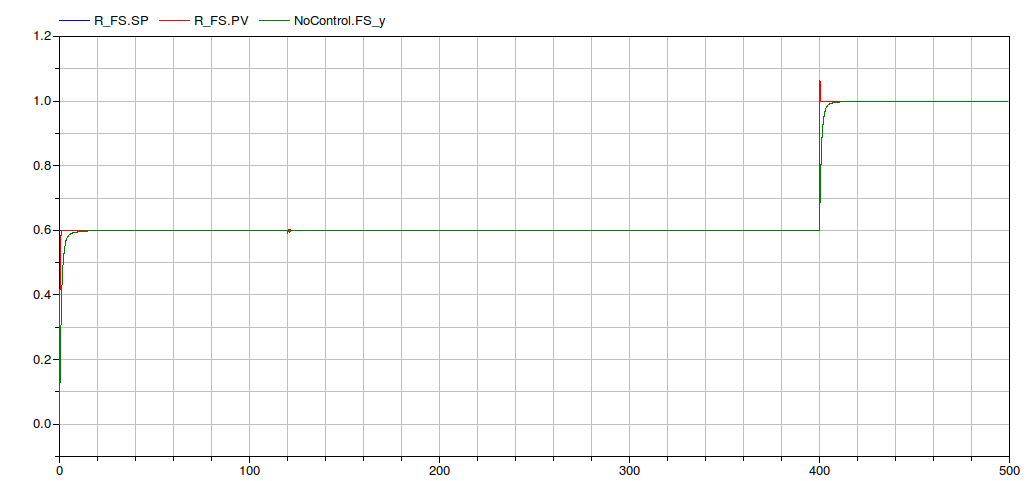
Process Trasfer function
| Fast Slow |
Y(s) 1 + 5.8s
---- = --------------
U(s) (1 + 6s)(1+s) |
Controller parameters
| Parameter |
Before |
After AT |
| Kp |
5 |
14.056 |
| Ti |
1 |
0.1365 |
Automatic Tuning algorithm parameters
| Parameter |
Value |
| slope |
1 |
| PermOxPeriodPerc |
5 |
| pm |
65 |
| nOxMin |
3 |
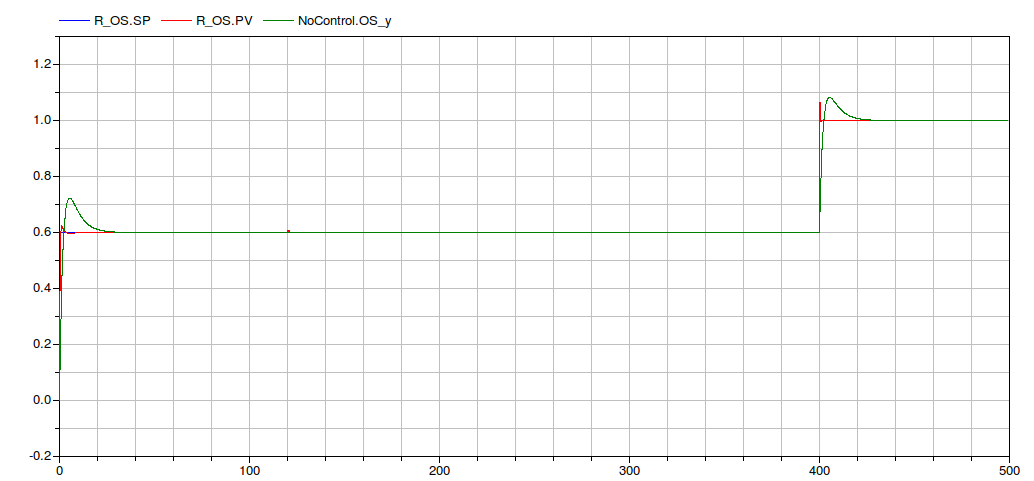
Process Trasfer function
| Overshooting |
Y(s) 1 + 8s
---- = ---------------
U(s) (1 + 5s)(1+2s) |
Controller parameters
| Parameter |
Before |
After AT |
| Kp |
5 |
17.3146 |
| Ti |
1 |
0.1365 |
Automatic Tuning algorithm parameters
| Parameter |
Value |
| slope |
1 |
| PermOxPeriodPerc |
5 |
| pm |
65 |
| nOxMin |
3 |
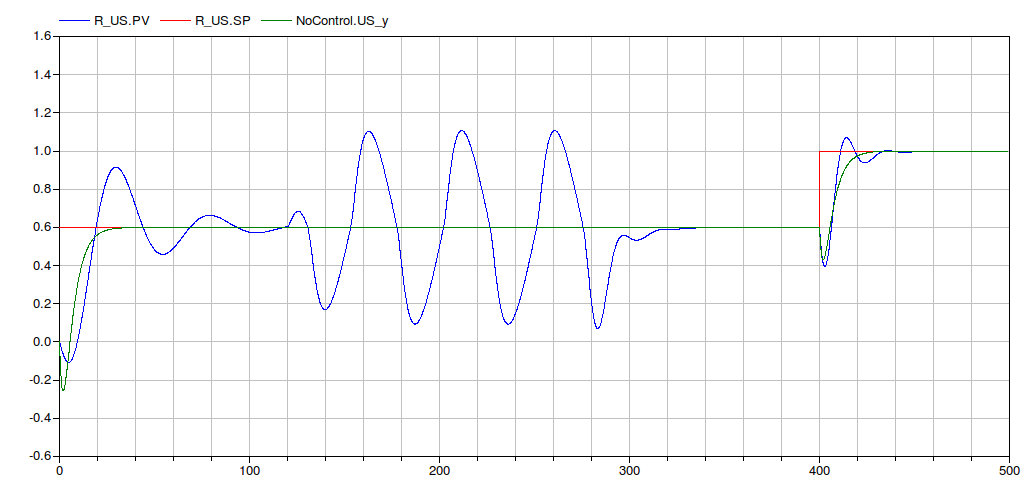
Process Trasfer function
| Undershooting |
Y(s) 1 - 5.5s
---- = ---------------
U(s) (1 + 5s)(1+2s) |
Controller parameters
| Parameter |
Before |
After AT |
| Kp |
0.1 |
7.69 |
| Ti |
1 |
0.692 |
Automatic Tuning algorithm parameters
| Parameter |
Value |
| slope |
0.05 |
| PermOxPeriodPerc |
5 |
| pm |
45 |
| nOxMin |
3 |
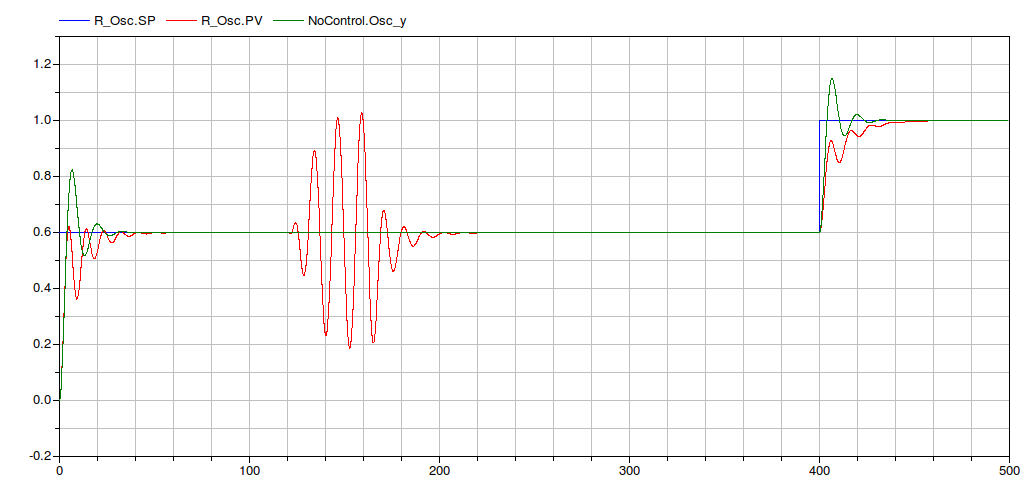
Process Trasfer function
| Complex Poles |
Y(s) 1
---- = --------------------
U(s) 1 + 1.2 s + 0.025s |
Controller parameters
| Parameter |
Before |
After AT |
| Kp |
1 |
0.548 |
| Ti |
5 |
4.3 |
Automatic Tuning algorithm parameters
| Parameter |
Value |
| slope |
0.1 |
| PermOxPeriodPerc |
5 |
| pm |
65 |
| nOxMin |
3 |
- Industrial Control Systems (v 1.0.0) : April-May 2012
-
- List of revisions:
-
- 11 May 2012 (author: Marco Bonvini)
- Main Authors:
- Marco Bonvini; <bonvini@elet.polimi.it>
- Alberto Leva <leva@elet.polimi.it>
- Politecnico di Milano
- Dipartimento di Elettronica e Informazione
- Via Ponzio 34/5
- 20133 Milano - ITALIA -
- Copyright:
- Copyright © 2010-2012, Marco Bonvini and Alberto
Leva.
- The IndustrialControlSystems package is free
software; it can be redistributed and/or modified under the terms
of the Modelica license.
Generated at 2026-07-21T20:30:55Z by OpenModelicaOpenModelica 1.27.0 using
GenerateDoc.mos