In this examples are compared two cascade control schemes: with
and without external lock.
When two controllers are connected together in a cascade control
scheme, the inner controller typically regulates the actuator,
while the outer one provides the Set Point reference for the inner
one.
Since the inner controller acts on the plants, its Control Signal
have to be limited, using AntiWindup. Unfortunately it is not
possible for the outer controller, to know the values for which the
inner regulator saturates.
Such a problem can be voided by using the PID in its incremental
form, using the Increment/Decrement lock feature, and creating an
external loop between the controllers.
If the inner regulator saturates, its satHi signal becomes true. Connecting this signal
to the forbidIncrement input of the
outer controller, avoid an useless and potentially dangerous
increase of its Control Signal ( that is the Set point of the inner
controller that saturated). With such a scheme a windup-like effect
can be avoided.
In the following figure, the green line is the CS of the outer
controller with Increment/Decrement lock, while the black one is
the output of the outer controller whitout Increment/Decrement
lock.
The black line shows a windup like effect that turns in a slower
reaction when the Set Point changes at time t = 30.
Set Point, Process Variables (with and without external lock) and
outer control signals (with and without external lock) 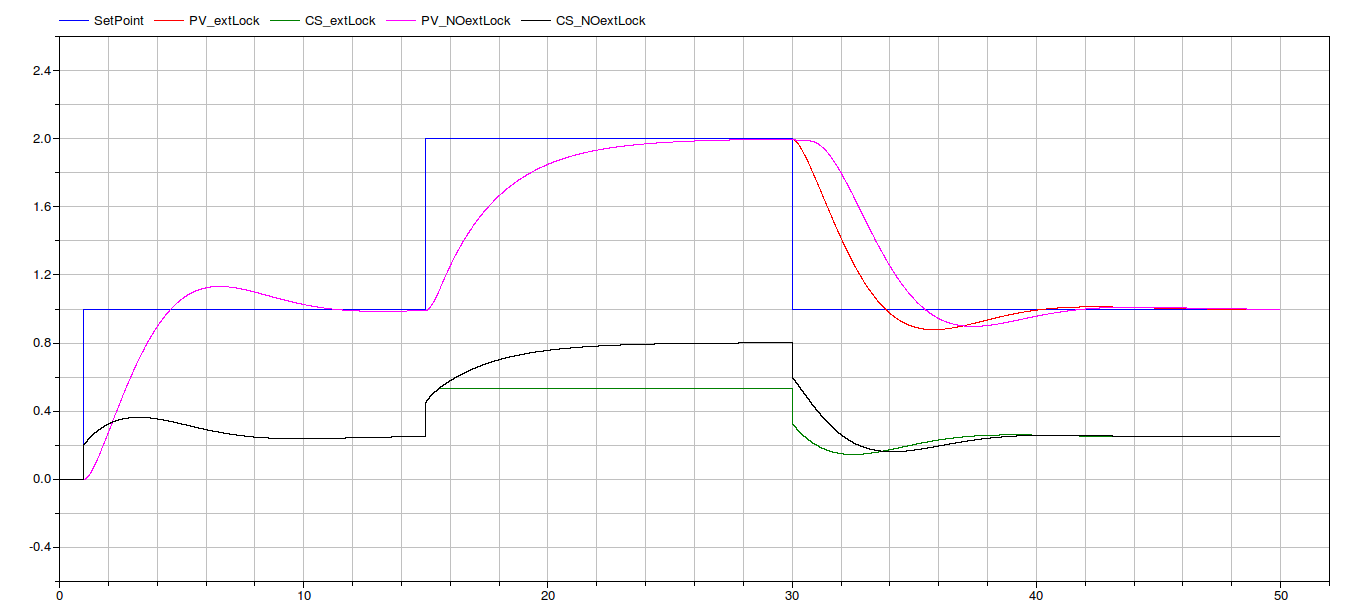
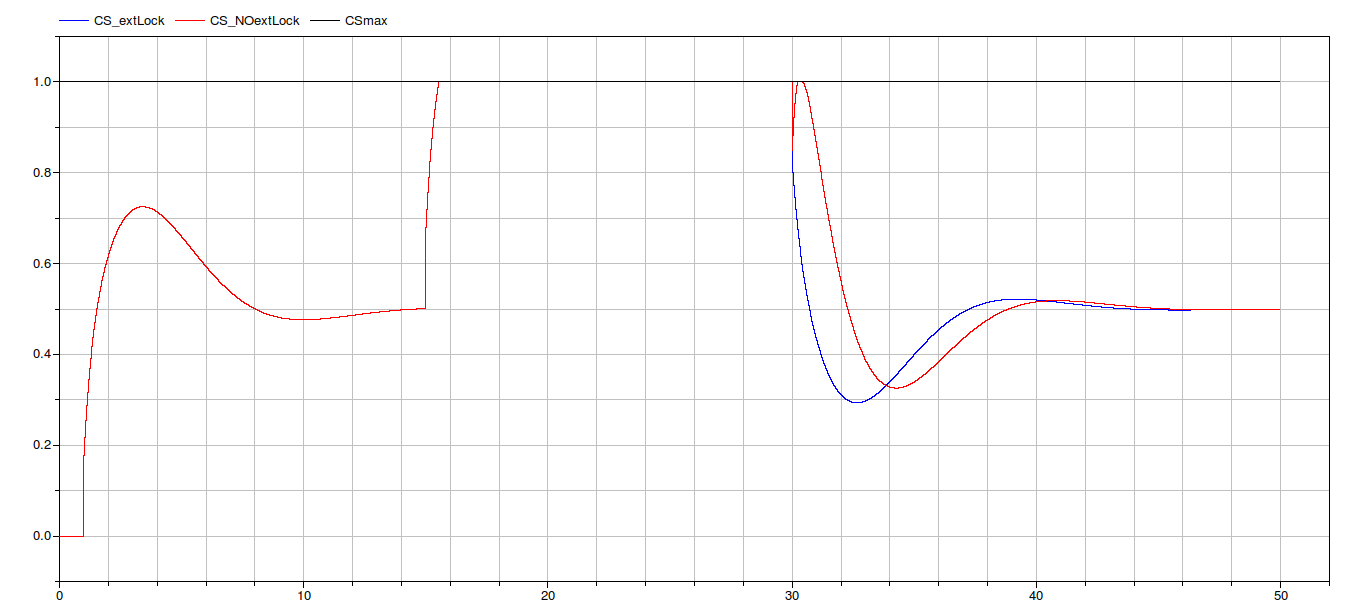
inner regulators Control Signal (with and without external lock)