Cascade control
Description
In this examples are compared two control schemes. The aim of
this example is to show how classic control strategy can be
implemented with the models contained within the
ControlLibrary.
The system to be controlled is composed by two dynamics: a fast one
and a slow one. The trasfer functions follow:
Fast
Y(s) 1
P1(s) = ---- = -------------
U(s) (1+0.05s)
Slow
Y(s) 1
P2(s) = ---- = -------------
U(s) (1+2s+s^2)
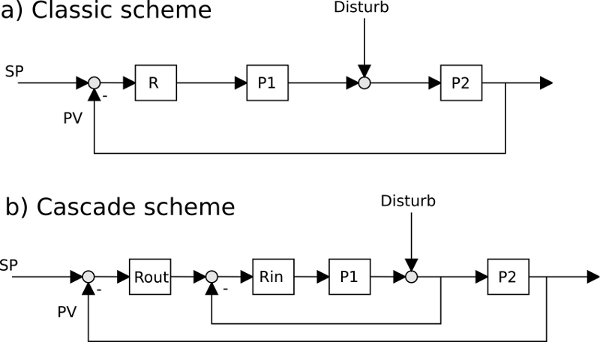
Two different control scheme (both using discrete dime controllers)
are compared. In the first one there is one controller that
acts
directly on the fast process P1 and measures the output of the
second process P2.
In the second case, there are two controllers that act respectively
on the fast and slow dynamics. The second approach is called
cascade control.
The Step responce of the two scheme are listed below.
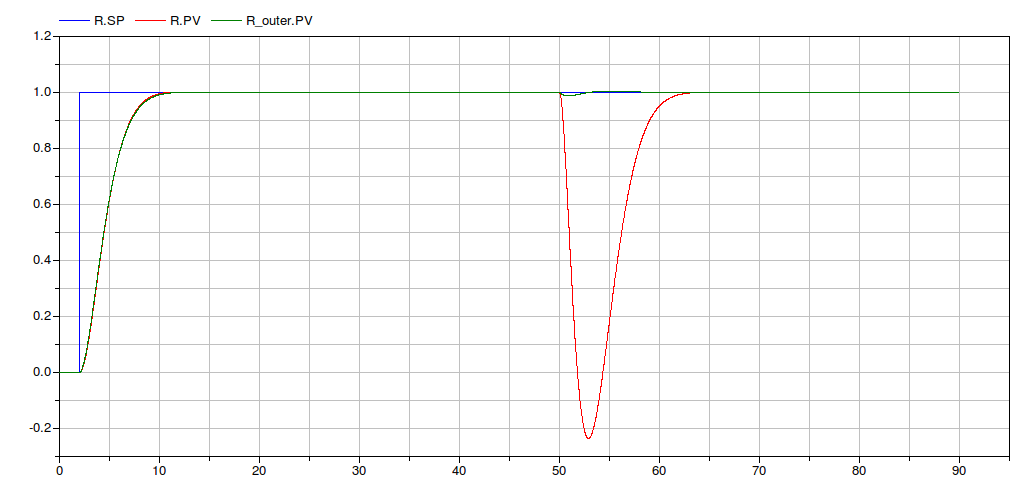
Despite for a step variation of the Set Point, the two responces
(classic scheme red line, and cascade the green one) are
practically the same, this is not true when disturbances occur. It
is evident that the cascade control scheme
performs better than the classic one. Below are reported the
control signal of the controllers
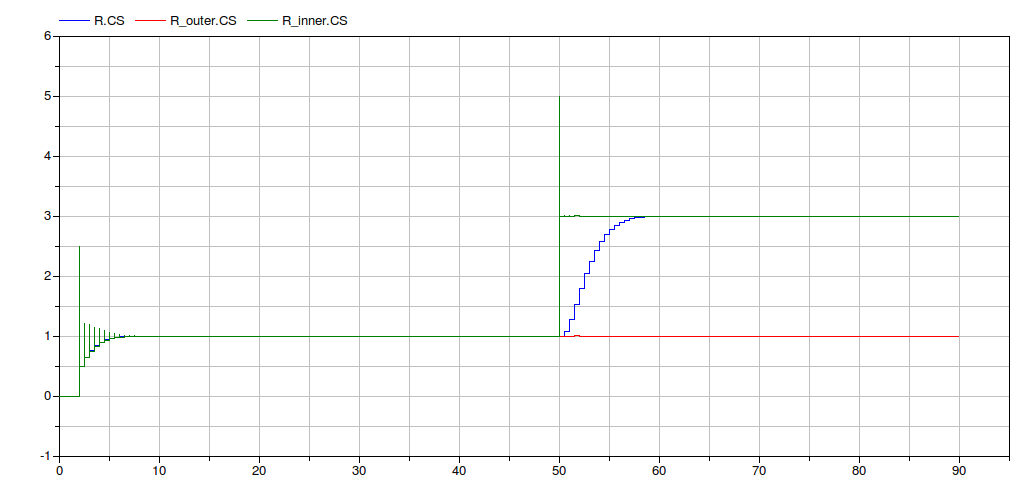
where is evidenced the fast action of the inner control loop.
Since the controller are discrete time ones, it is important to
choose the right sampling time for each loop
(external and internal one). In this case have been choosen a
sampling time of 0.5 s for the outer loop, while a
sampling time of 0.01 s for the inner one.
- Industrial Control Systems (v 1.0.0) : April-May 2012
-
- List of revisions:
-
- 11 May 2012 (author: Marco Bonvini)
- Main Authors:
- Marco Bonvini; <bonvini@elet.polimi.it>
- Alberto Leva <leva@elet.polimi.it>
- Politecnico di Milano
- Dipartimento di Elettronica e Informazione
- Via Ponzio 34/5
- 20133 Milano - ITALIA -
- Copyright:
- Copyright © 2010-2012, Marco Bonvini and Alberto
Leva.
- The IndustrialControlSystems package is free
software; it can be redistributed and/or modified under the terms
of the Modelica license.
Generated at 2026-07-21T20:30:55Z by OpenModelicaOpenModelica 1.27.0 using
GenerateDoc.mos