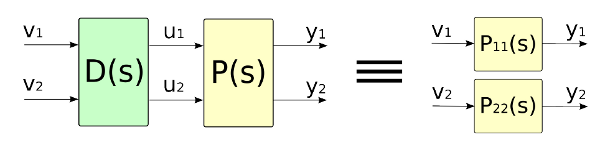
Decoupler for a two input two output process (see
Process ).
The aim of the decoupler (represented in the following figure) is
to reduce (ideally to delete them) the effects of the first input
U1 on the second output Y2 and vice versa.
This can be done introducing the new variables (V1,V2) and placing
the decoupler between them and the real process.
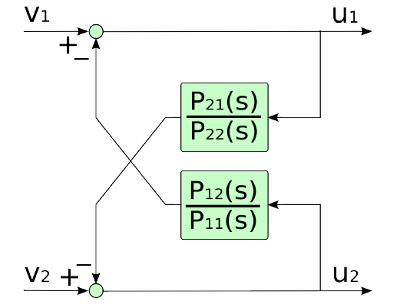
The decoupler is described by the following scheme (backward
decoupler)
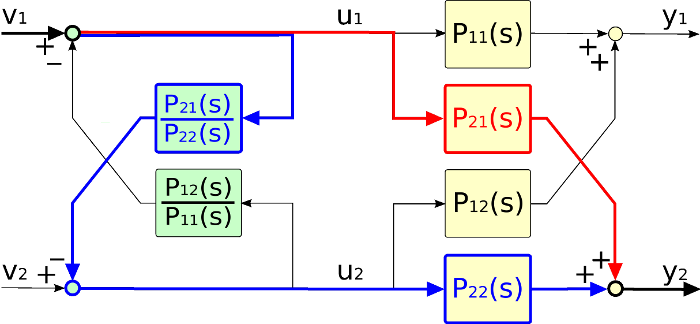
The effect of the decoupler is shown in the following picture where
the decoupler with its backward action deletes the relation between
V1 and Y2 (the sum of the blue and red paths).
Once the process is known (P11,P21,P21,P22), the decoupler can be
specified by the definition of the two rational trasfer
functions
P12(s) ------ P11(s)and
P21(s) ------ P22(s)