Comparison between continuous time PID and its discrete time
implementations
Description
In this examples are compared three PID controllers:
- Continuous time PID with two degrees of freedom (model PID (with
Ts=0) ),
- the discretised version of the continuous time PID with two
degrees of freedom (model PID
),
- and the digital implementation of the PID with two degrees of
freedom in the incremental form (model PID_2dof
).
There controllers regulates a second order process with trasfer
function
Y(s) (1+15s)
---- = ----------------
U(s) (1+10s)(1+2s)
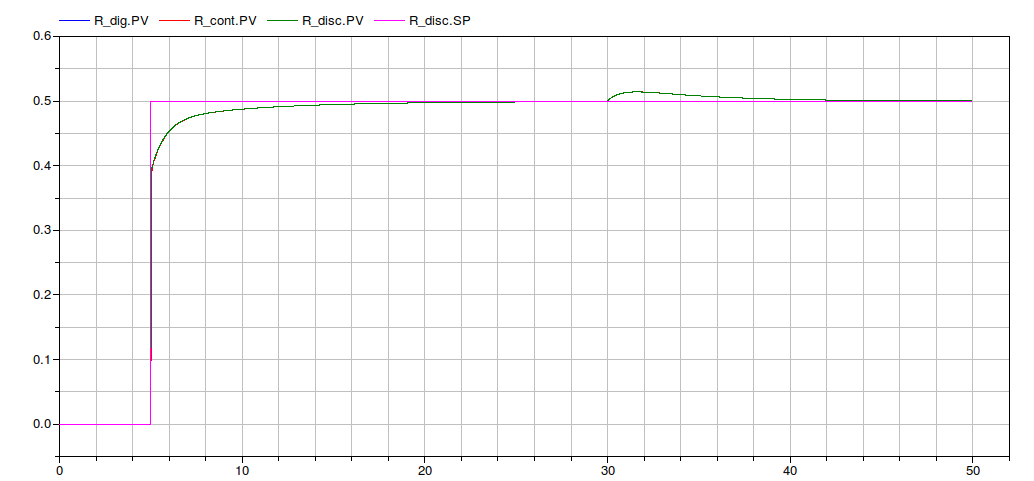
The following images show the SetPoint following and disturbance
rejection without saturation
Set Point and Process Variables
Control Signals
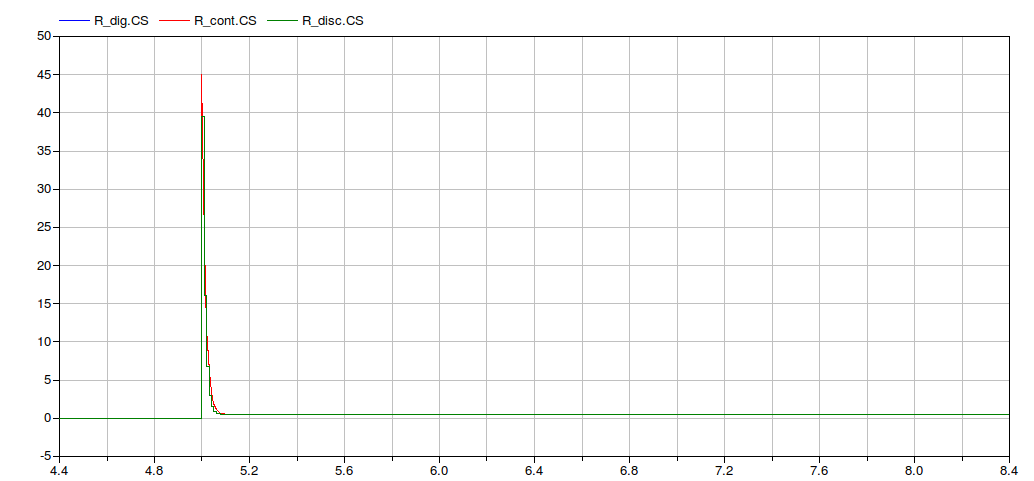
To be noticed that the discretised version of the PID and the
digital implementation of the incremental PID have the same
behaviour.
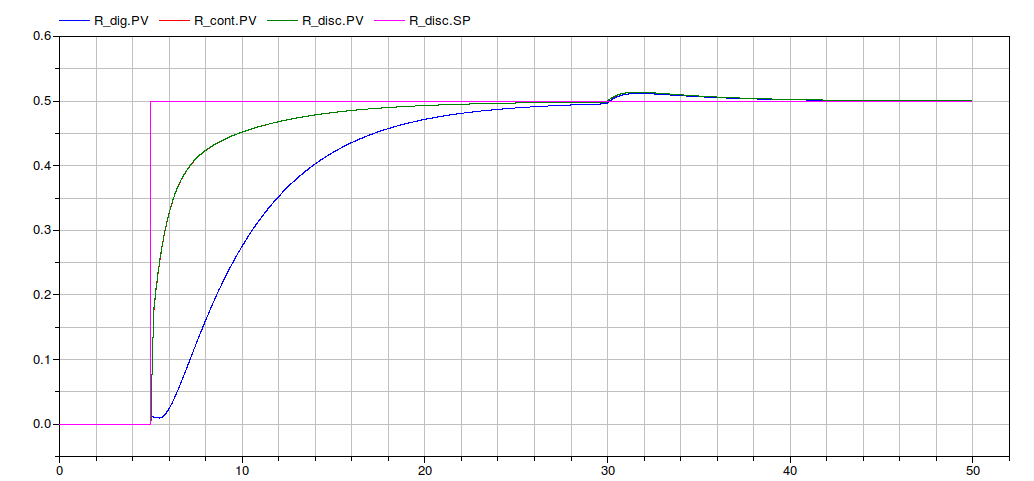
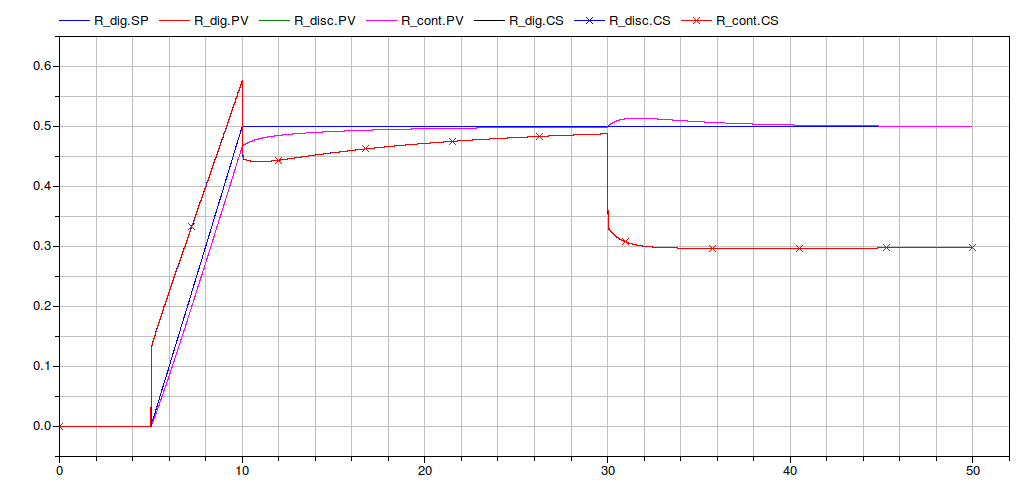
The same is not valid when the saturation is introduced. If
limiting the controller action between [0,2] the discrete time
version and the digital one behave quite differently
Set Point and Process Variables
Control Signals
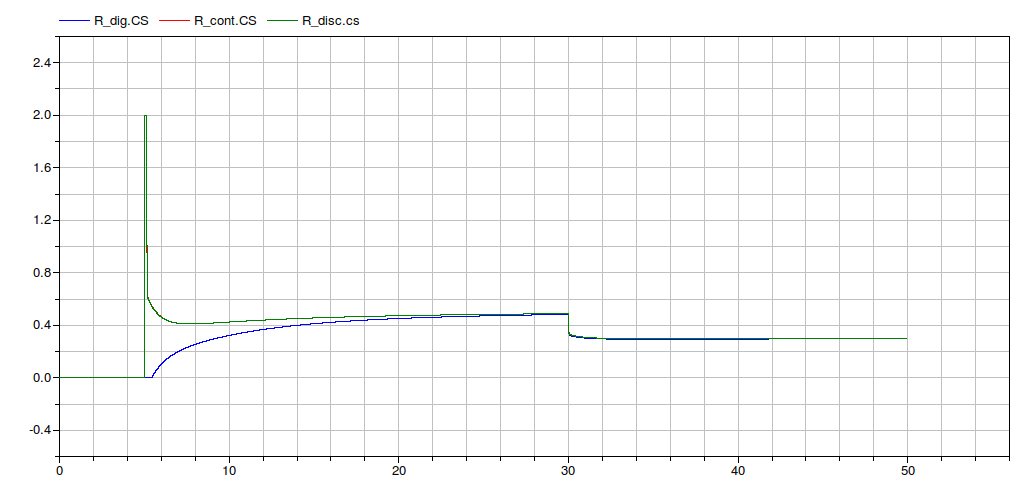
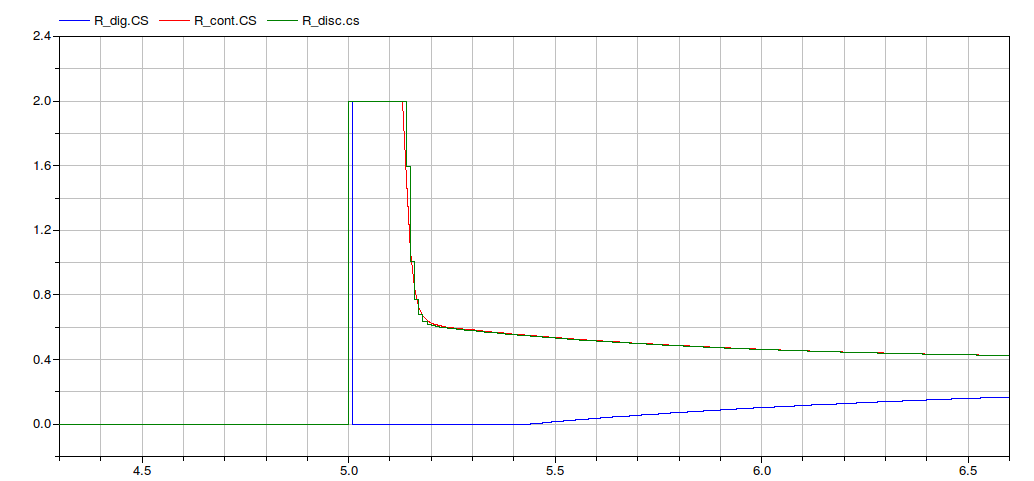
This difference is due to the nature of the digital implementation
that is incremental, while the other two are positional.
This problem does not appear if the Set Point reference changes
soothly, switching to a ramp Set Point signal, as shown in the
following picture.
Process Variables and Control Signals with a ramp Set
Point
- Industrial Control Systems (v 1.0.0) : April-May 2012
-
- List of revisions:
-
- 11 May 2012 (author: Marco Bonvini)
- Main Authors:
- Marco Bonvini; <bonvini@elet.polimi.it>
- Alberto Leva <leva@elet.polimi.it>
- Politecnico di Milano
- Dipartimento di Elettronica e Informazione
- Via Ponzio 34/5
- 20133 Milano - ITALIA -
- Copyright:
- Copyright © 2010-2012, Marco Bonvini and Alberto
Leva.
- The IndustrialControlSystems package is free
software; it can be redistributed and/or modified under the terms
of the Modelica license.
Generated at 2026-07-21T20:30:55Z by OpenModelicaOpenModelica 1.27.0 using
GenerateDoc.mos