In this examples the typical processes (contained in model
TypicalTF ) are controlled with PID regulators.
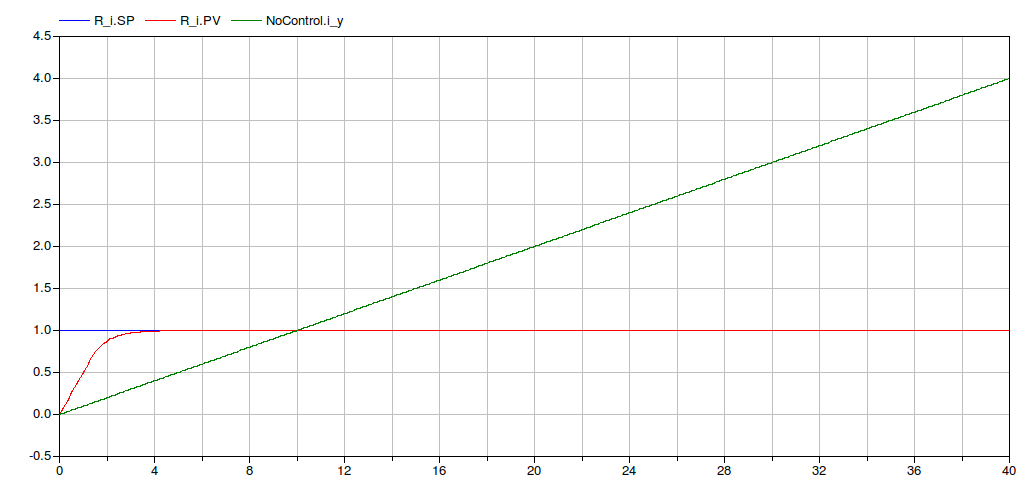
Process Trasfer function
| Integrator | |
|---|---|
Y(s) 1 ---- = ----- U(s) 5s |
| Parameter | Value |
|---|---|
| Kp | 100 |
| Ti | 1 |
| Td | 0.1 |
| N | 10 |
| b | 1 |
| c | 1 |
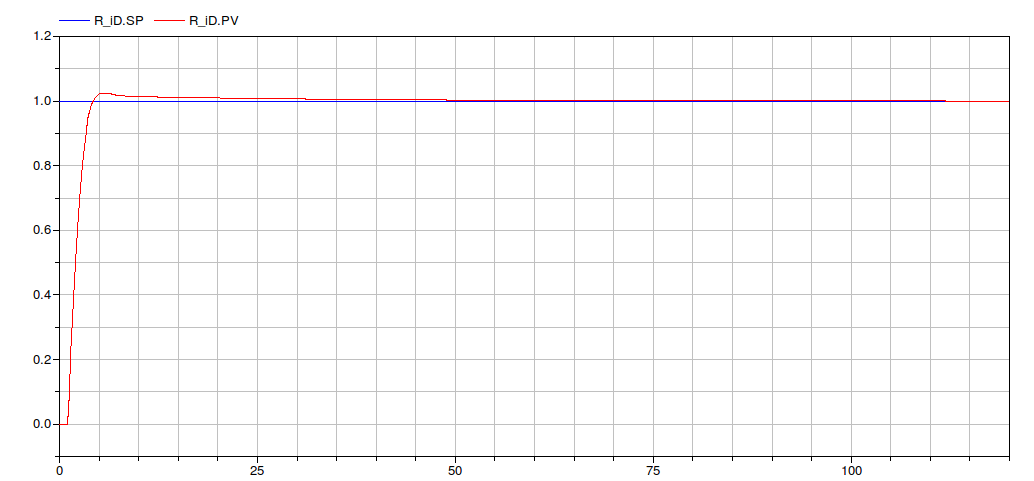
| Integrator + delay | |
|---|---|
Y(s) 1 -1s ---- = ----- e U(s) 5s |
| Parameter | Value |
|---|---|
| Kp | 5 |
| Ti | 30 |
| Td | 0.1 |
| N | 8 |
| b | 1 |
| c | 1 |
| First Order | |
|---|---|
Y(s) 1 ---- = -------- U(s) 1 + 5s |
| Parameter | Value |
|---|---|
| Kp | 10 |
| Ti | 3 |
| Td | 0.8 |
| N | 8 |
| b | 1 |
| c | 1 |
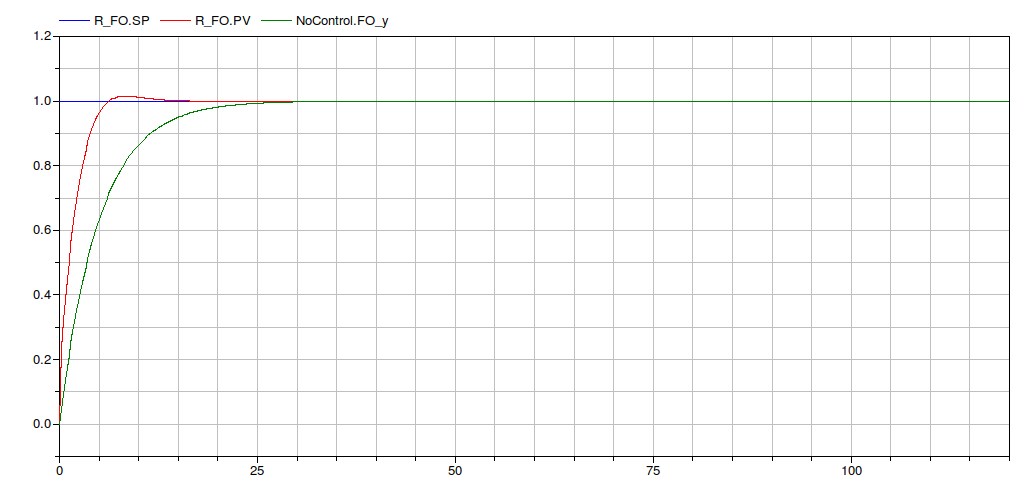
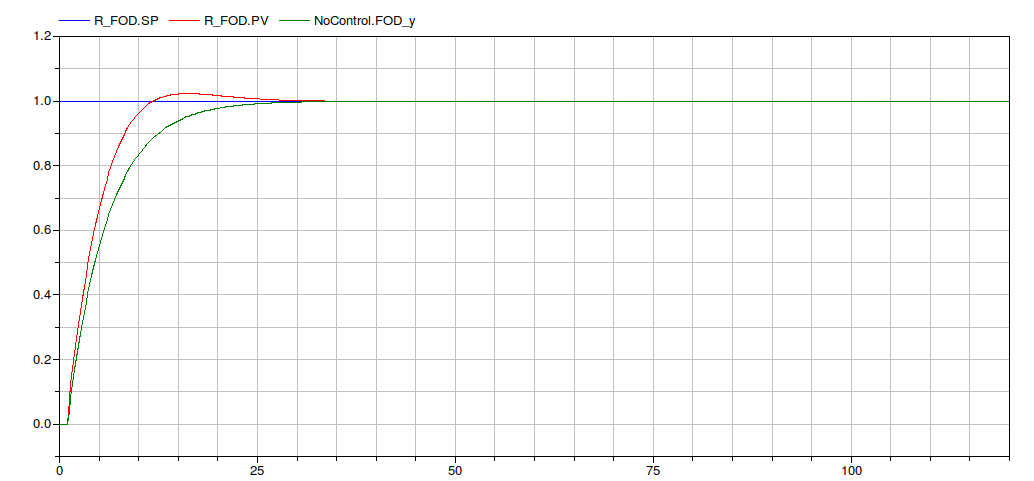
| First Order + delay | |
|---|---|
Y(s) 1 -2s ---- = -------- e U(s) 1 + 5s |
| Parameter | Value |
|---|---|
| Kp | 1 |
| Ti | 4 |
| Td | 0.2 |
| N | 5 |
| b | 1 |
| c | 1 |
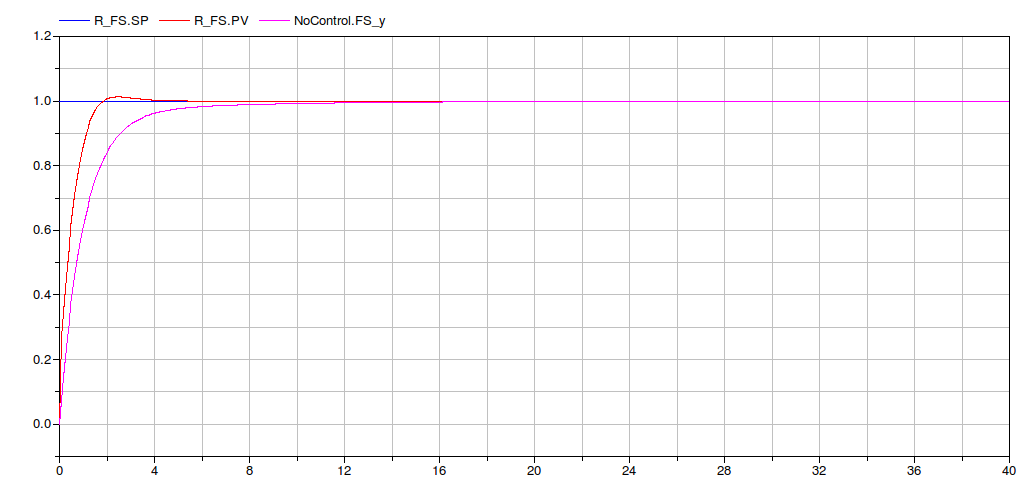
| Fast Slow | |
|---|---|
Y(s) 1 + 5.8s ---- = -------------- U(s) (1 + 6s)(1+s) |
| Parameter | Value |
|---|---|
| Kp | 5 |
| Ti | 0.8 |
| Td | 0.2 |
| N | 10 |
| b | 1 |
| c | 1 |
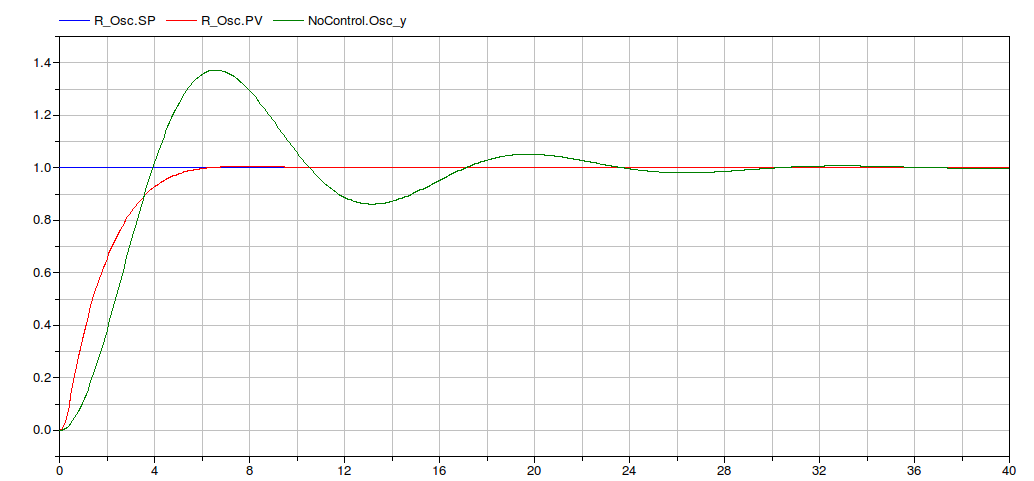
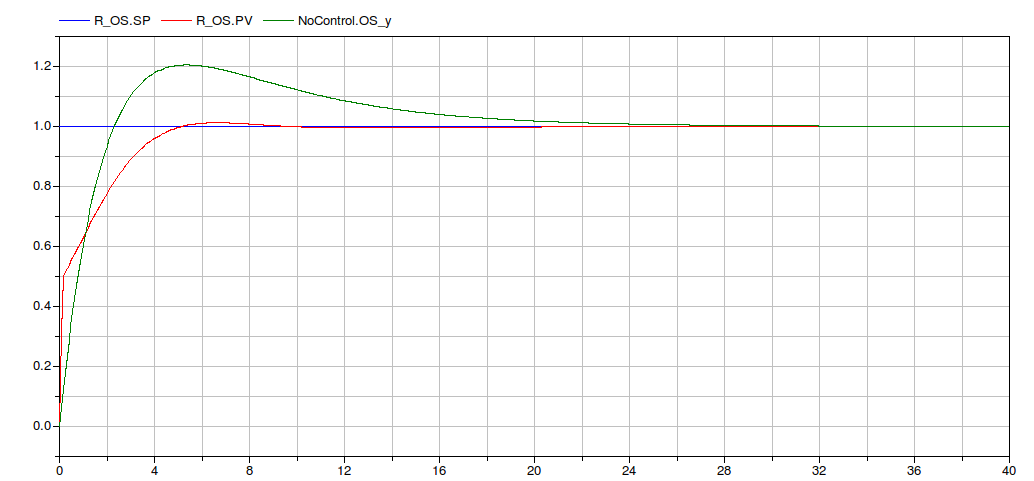
| Overshooting | |
|---|---|
Y(s) 1 + 8s ---- = --------------- U(s) (1 + 5s)(1+2s) |
| Parameter | Value |
|---|---|
| Kp | 5 |
| Ti | 2 |
| Td | 1 |
| N | 10 |
| b | 1 |
| c | 1 |
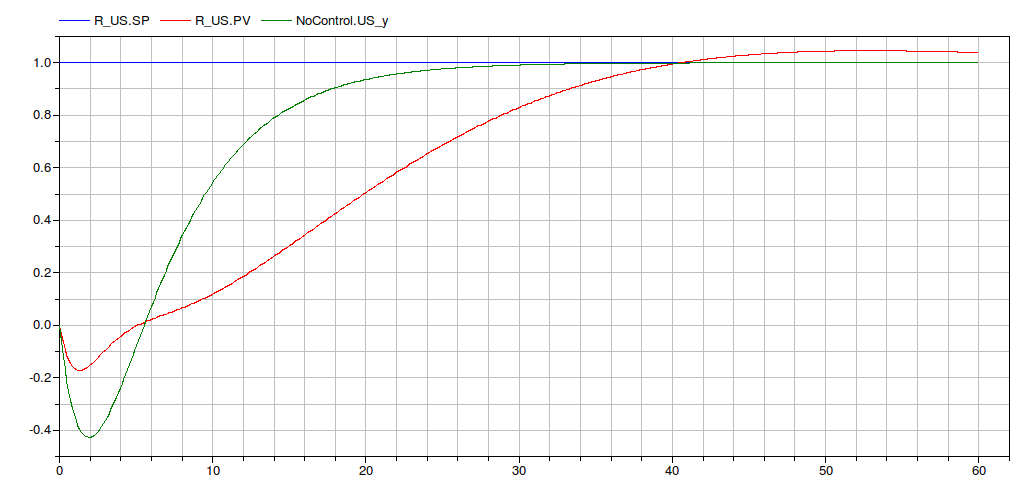
| Undershooting | |
|---|---|
Y(s) 1 - 5.5s ---- = --------------- U(s) (1 + 5s)(1+2s) |
| Parameter | Value |
|---|---|
| Kp | 0.1 |
| Ti | 2 |
| Td | 5 |
| N | 5 |
| b | 1 |
| c | 1 |
| Complex Poles | |
|---|---|
Y(s) 1 ---- = -------------------- U(s) 1 + 1.2 s + 0.025s |
| Parameter | Value |
|---|---|
| Kp | 10 |
| Ti | 2.5 |
| Td | 1 |
| N | 10 |
| b | 1 |
| c | 1 |