Smith predictor controller for delayed processes
Description
The aim of this example is to show how classic control strategy
can be implemented with the models contained within the
ControlLibrary.
The system to be controlled is a delayed second order one
Y(s) 1 -8T
P(s) = ---- = ---------------- e
U(s) (1+0.2s)(1+s)
In this case the delay is too high in order to control the process
with a simple PI controller. However, the same simple
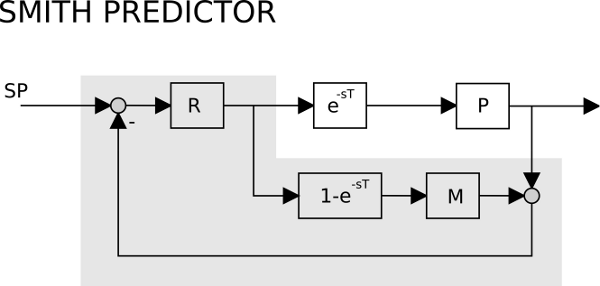
controller can be used within a more complex structure called Smith
predictor. This scheme is based on the knowledge of the
process
since it is a model based control strategy. The control scheme
follows, and can be replicated with the blocks contained in the
library
Two different scheme have been tested. In the first scheme the
Smith predictor is based on a model that is equal to the
real process (M(s) = P(s)), while in the second one the model is an
approximation of the process. The step responces are reported
below
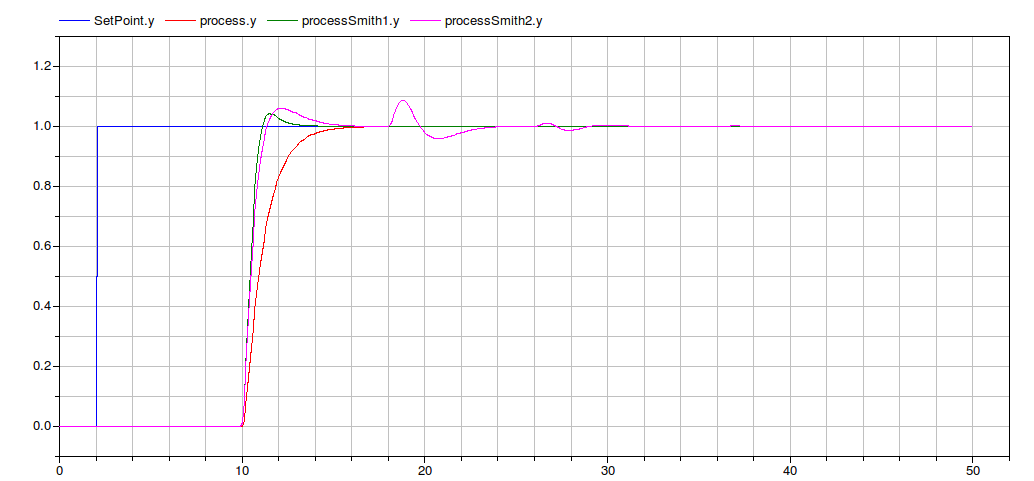
The red line is the process responce without the controller action,
the green line is the process controlled with the Smith predictor
(M(s) = P(s)) while the pink one is the responce of the Smith
predictor with an approximate model.
Every 8 seconds (the time delay) there is an action due to the
uncorrectness of the model M. However, the amplitude
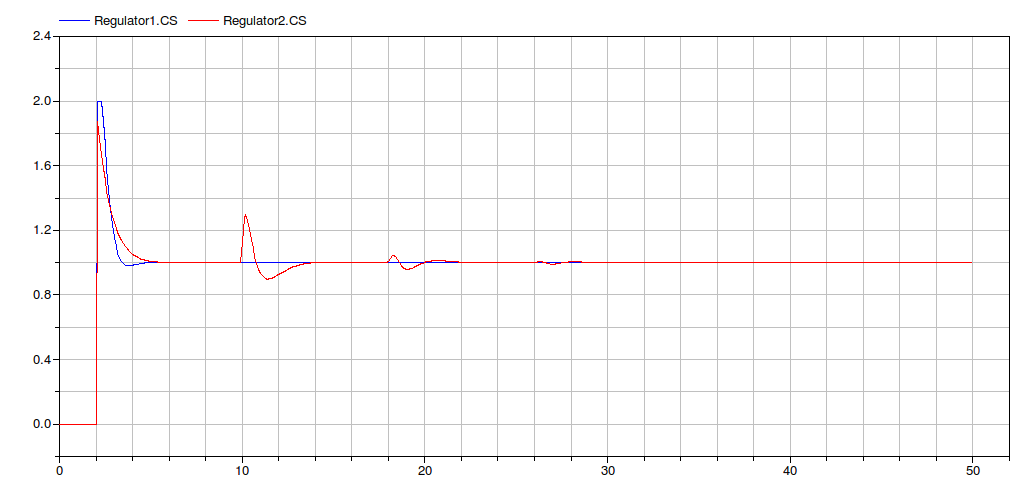
of these peacks decrease with time. The control signal of the two
controllers are reported below.
- Industrial Control Systems (v 1.0.0) : April-May 2012
-
- List of revisions:
-
- 11 May 2012 (author: Marco Bonvini)
- Main Authors:
- Marco Bonvini; <bonvini@elet.polimi.it>
- Alberto Leva <leva@elet.polimi.it>
- Politecnico di Milano
- Dipartimento di Elettronica e Informazione
- Via Ponzio 34/5
- 20133 Milano - ITALIA -
- Copyright:
- Copyright © 2010-2012, Marco Bonvini and Alberto
Leva.
- The IndustrialControlSystems package is free
software; it can be redistributed and/or modified under the terms
of the Modelica license.
Generated at 2026-07-21T20:30:55Z by OpenModelicaOpenModelica 1.27.0 using
GenerateDoc.mos