Comparison of the basic continuous and discrete time blocks
Description of the example
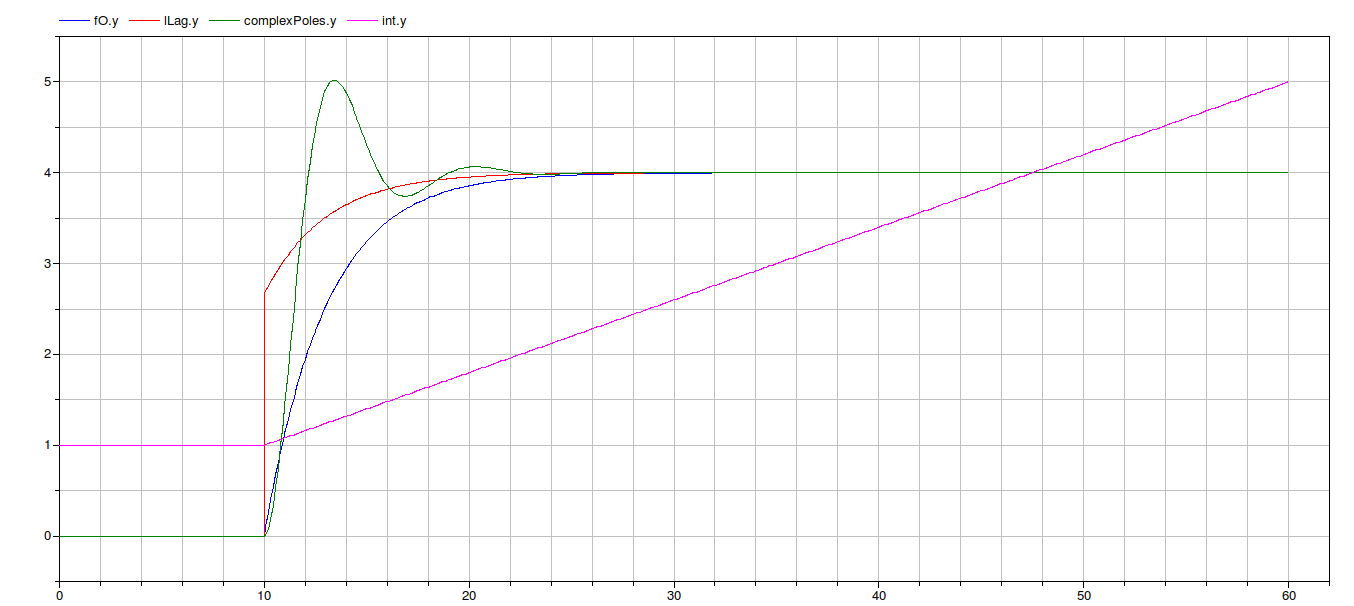
In this example are shown the step responces of various basic
linear systems:
- integrator,
- first order,
- lead lag,
- and complex poles
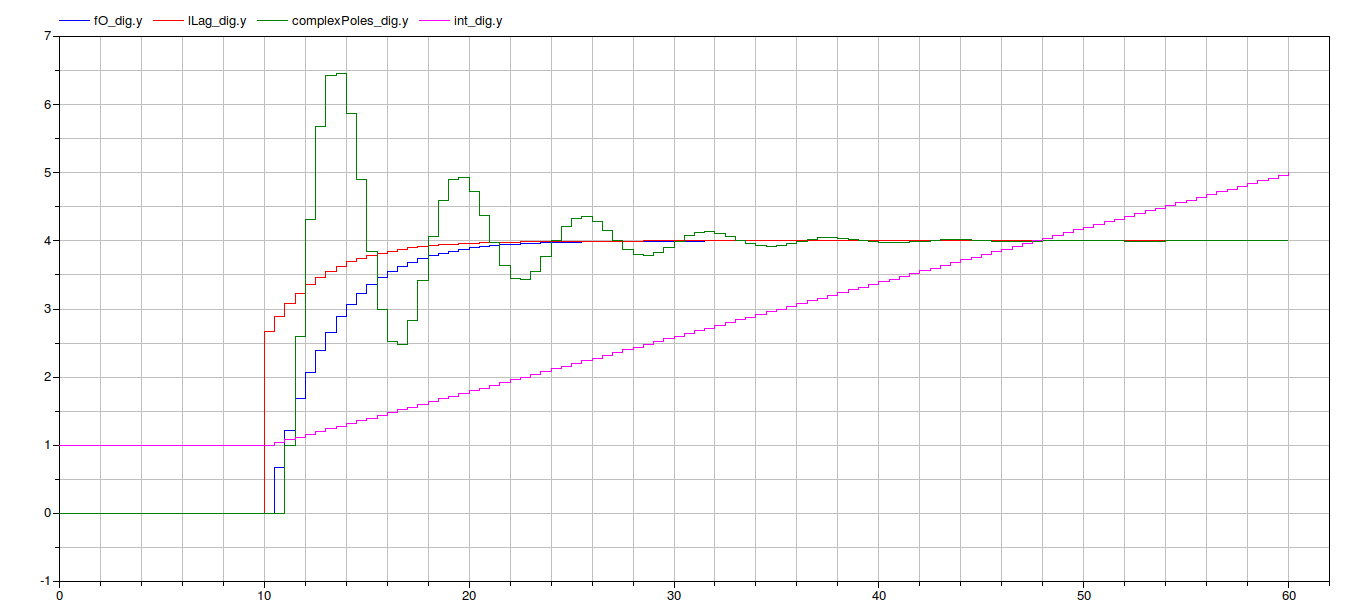
For each continuous time system there is its discretised version.
It is possible to modify the discretisation methods
as well the sampling time in order to see the changes.
Continuous time
Discrete time (Forward Euler)
- Industrial Control Systems (v 1.0.0) : April-May 2012
-
- List of revisions:
-
- 11 May 2012 (author: Marco Bonvini)
- Main Authors:
- Marco Bonvini; <bonvini@elet.polimi.it>
- Alberto Leva <leva@elet.polimi.it>
- Politecnico di Milano
- Dipartimento di Elettronica e Informazione
- Via Ponzio 34/5
- 20133 Milano - ITALIA -
- Copyright:
- Copyright © 2010-2012, Marco Bonvini and Alberto
Leva.
- The IndustrialControlSystems package is free
software; it can be redistributed and/or modified under the terms
of the Modelica license.
Generated at 2026-07-17T20:32:01Z by OpenModelicaOpenModelica 1.27.0 using
GenerateDoc.mos