It is demonstrated how the Modelica.Mechanics.MultiBody.Joints.Assemblies.JointRRR joint can be used to solve the non-linear equations of coupled planar loops analytically. In the mechanism below no non-linear equation occurs any more from the tool view, since these equations are solved analytically in the JointRRR joints. For more details, see MultiBody.UsersGuide.Tutorial.LoopStructures.AnalyticLoopHandling.
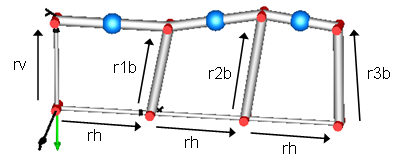
In the following figure the parameter vectors of this example are visualized in the animation view.