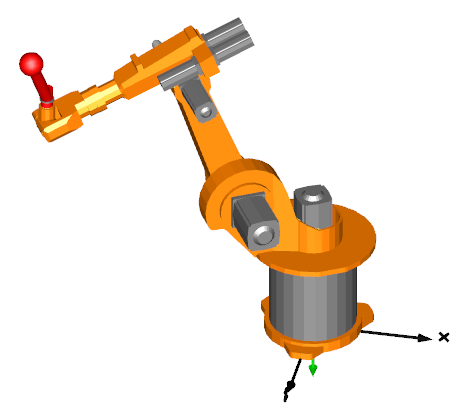
This example animates a motion of a detailed model of the robot with predefined axes' angles over time. For animation, CAD data is used. Translate and simulate with the default settings (default simulation stop time = 2 s).
The path planning block incorporates a simulation termination condition. Thus, the simulation can be terminated before reaching the stop time. The condition depends on the start and end positions of the joints, and on their reference speeds and reference accelerations. For current settings, the termination condition should indeed be fulfilled right before the simulation stops.