Rigid body with mass and inertia tensor and two frame connectors. All parameter vectors have to be resolved in frame_a. The inertia tensor has to be defined with respect to a coordinate system that is parallel to frame_a with the origin at the center of mass of the body. The coordinate system frame_b is always parallel to frame_a.
By default, this component is visualized by any shape that can be defined with Modelica.Mechanics.MultiBody.Visualizers.FixedShape. This shape is placed between frame_a and frame_b (default: length(shape) = Frames.length(r)). Additionally a sphere may be visualized that has its center at the center of mass. Note, that the animation may be switched off via parameter animation = false.
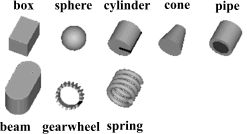
The following shapes can be defined via parameter shapeType, e.g., shapeType="cone":
A BodyShape component has potential states. For details of these states and of the "Advanced" menu parameters, see model MultiBody.Parts.Body.