With this example it is demonstrated how to use the MultiBody.Joints.Assemblies.JointUPS joint to build up a force element with masses and inertias (note, MultiBody.Forces.LineForceWithMass is a default line force element with a point mass to approximate the mass properties of the component):
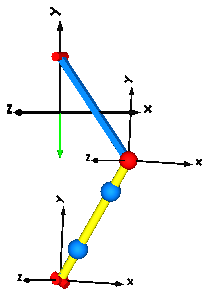
A JointUPS consists of a universal, prismatic and spherical joint aggregation that approximates a real force component, such as a hydraulic cylinder. At frame frame_ia at the universal joint and at frame frame_ib at the spherical joint, bodies can be attached describing the mass properties of the component. Between the 1-dimensional mechanical translational flanges "axis" and "bearing" a one-dimensional force law can be attached, e.g., from the Modelica.Mechanics.Translational or the HyLib package (= library of hydraulic components). In this example, just a linear damper is connected here.