General
With this example the user can characterize the motor for a
selected joint by its transfer function assuming a first order
transfer function. With the transfer function obtained a
proportional gain is then calculated for a proportional
control.
Implementation
The system is interconnected using the SignalDCMotor for one joint and a
Position source for the other
joint (to maintain it at its initial position).
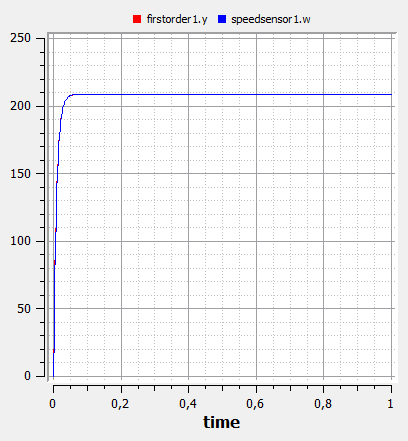
Once simulated, the values of tau (time constant T) and K (gain k)
are obtain for the equivalent first order transfer function with
the relations:
K = gain of system for steady state/ reference value
tau = time to reach ~ 0.63K
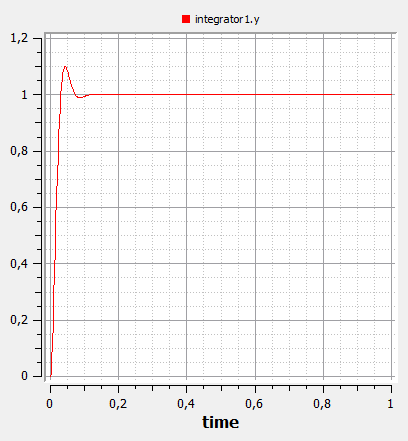
Then the proportional gain is calculated for a maximum overshot
(O) requirement using the following equation:
Note that O is the overshot value (for example 0.1) not a
porcentual overshoot PO (for example 10%).
Notes
- The PID block controller type must be
.Modelica.Blocks.Types.SimpleController.P for
proportional control.
- At the moment the K and tau values are obtain after simulating
and observing speed responce of motor.
- At the moment the kp value should be calculated externally,
although it could be implemented using a modelica function
Example
Results:
Generated at 2026-07-26T20:40:21Z by OpenModelicaOpenModelica 1.27.0 using
GenerateDoc.mos