General
With this model the torque and RMS torque on each joint can be
analysed. With this configuration the dynamic of the system can be
calculated.
Implementation
The block of the trayectory is used as input. The outputs of
this block are connected to the inputs of the block of inverse
kinematics. In this way the coordinates of the trayectory are
transform into joint variables.
Utilizing the position source the mechanisms will follow the
trayectory and with the acausal modelling it is possible to obtain
the torque needed in each joint. If a reduction is used, then the
joint variables should be multiplied with the parameter ratio of
the idealgear block in order to obtain the expected result.
Notes
- The velocities obtain are equivalent to calculate
differential fordward kinematics
- The results in this simulations are equivalent to obtain the
dynamical behaviour of the systems with methods as Euler
Lagrange Equations or Newton-Euler
Equations.
- The analysis of torques and velocities allow the selection of
the actuator (dc motor) following the next criteria (although it
should be taken into account the effects of disturbances):
- In order to evaluate the rms torque the simulation should run
for two cycles
- Note that there are two torque analysis (or force analysis)
elements per joint, one to evaluate the needed values for the
mechanisms and other for those that the motor would proportionate
if a reduction is added.
Example
For the first joint:
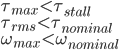
Position
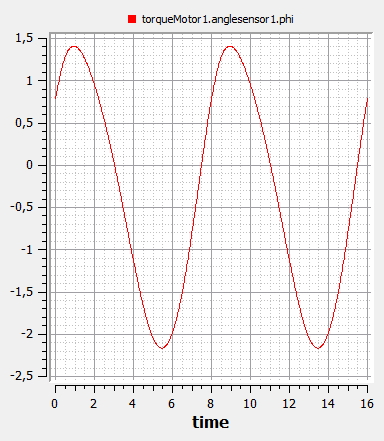 Velocity
Velocity
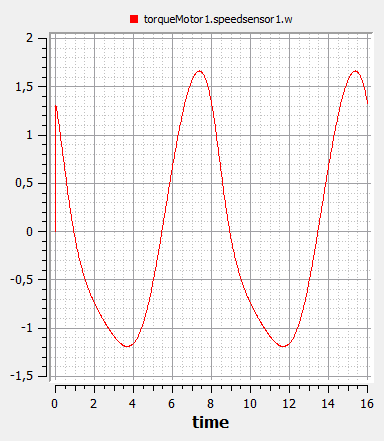 Acceleration
Acceleration
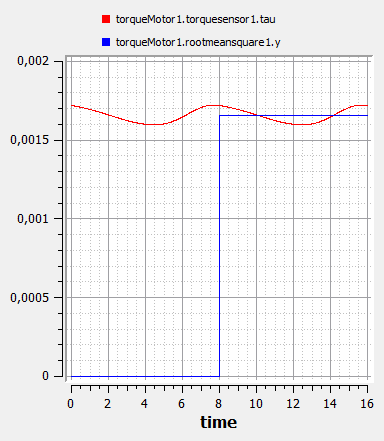
 Torque and RMS torque since the second cycle
Torque and RMS torque since the second cycle
Generated at 2026-07-26T20:40:21Z by OpenModelicaOpenModelica 1.27.0 using
GenerateDoc.mos