RR Mechanism
General
This class models a 2R mechanism. It is intended to be used as a
RR planar mechanism also known as planar elbow manipulator.
Implementation
It uses RLink element and
it's based on the next scheme:
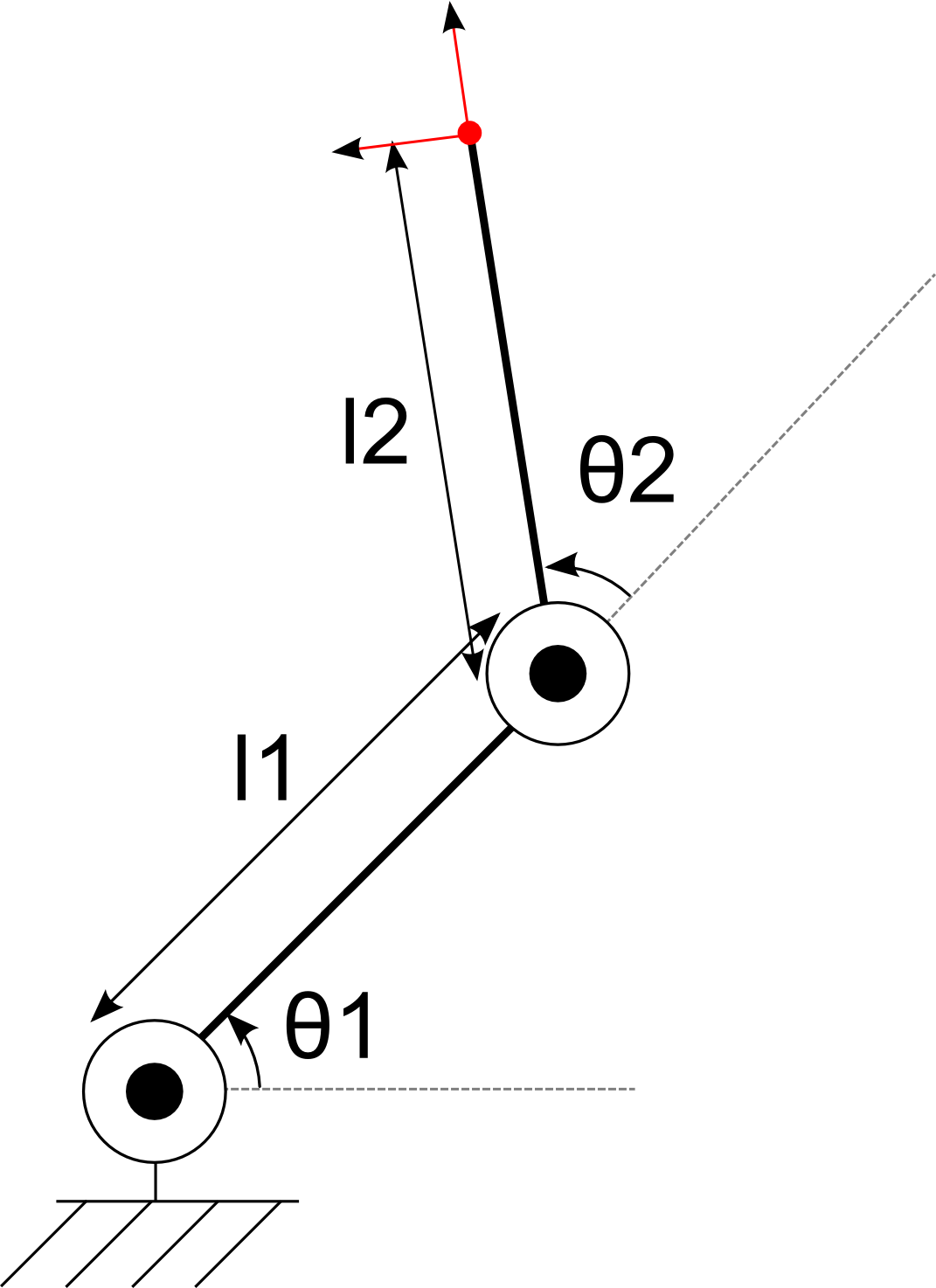
Notes
- The first joint is fixed in the origin.
- By default the joint axis is the z axis (rotation axis in
direction
n=[0,0,1]
) and gravity is in direction
n=[0,-1,0]
- The generalized coordinates theta1 and theta2 are the angles of
each joint in radians as shown in the figure.
- The interfaces are Modelica.Mechanics.Rotational
- The mechanical parameters of each link are editable
(dimensions, mass, etc)
- The World element
is included in the model.
Generated at 2026-07-26T20:40:21Z by OpenModelicaOpenModelica 1.27.0 using
GenerateDoc.mos