With this component the workspace of planar 2 DOF mechanism can be obtain.
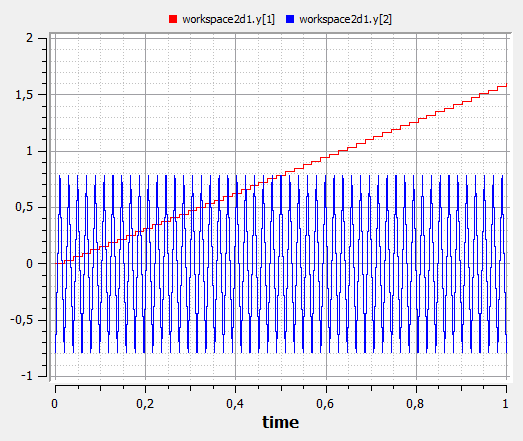
This block generates a sweep between min1 and max1 values according to the step (paso1) for the output y[1]. For each step in y[1] a sweep fordwards and then backwards is generated for y[2] between min2 and max2 with paso2. In this way all the combinations for two variables are included.
An example can be found in Servomechanisms.Examples.RRServomechanisms.RRWorkspace.
The outputs using default parameters are: