The torque output of the angular velocity control is limited to
avoid significant dynamics around zero speed and for negative
speeds. Since the electric machine is operated as generator, the
mechanical power is negative. The generator is operated at positive
angular speed w and thus torque tau is
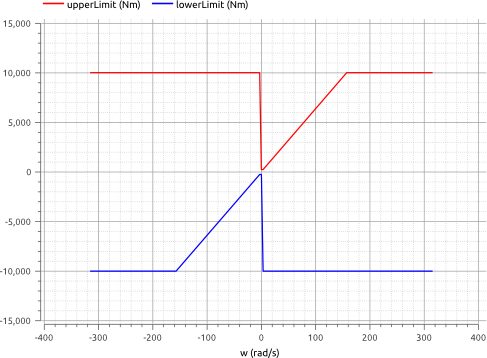
negative. Torque limitation, however, is implemented as function of
speed. The characteristic of the torque limiter is shown the figure
below for tauRef = 10kNm. However, In the investigated
case the reference speed wRef = 50*pi rad/s. For
positive speeds greater than linear = 2% of the
reference speed the torque is not limited. The range between zero
angular speed and 2% of the reference speed torque is limited by
the steep linear curve shown in the figure below. In the negative
speed range - which shall never be reached - torque is limited
linearly towards the negative reference angular velocity. In the
vicinity of zero speed torque is limited by limit = 2%
with respect to tauRef.
 |