In this example have been compared the 2DoF incremental PID,
with its Time Division Output implementation.
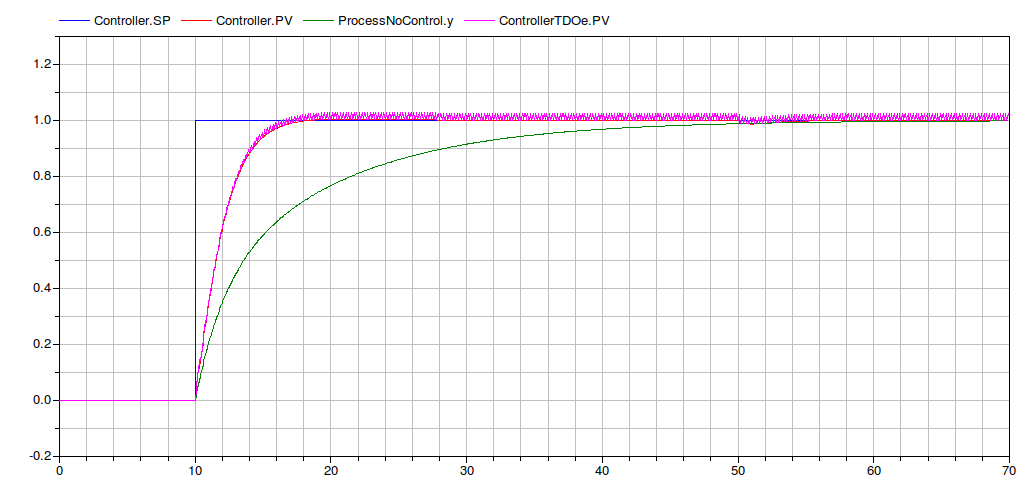
The PIDs have to control the process with transfer function
Y(s) 5*s +1 ---- = ----------------------- U(s) 20*s^2 + 12*s + 1The image compares the outputs of the process y with and without the controllers action.
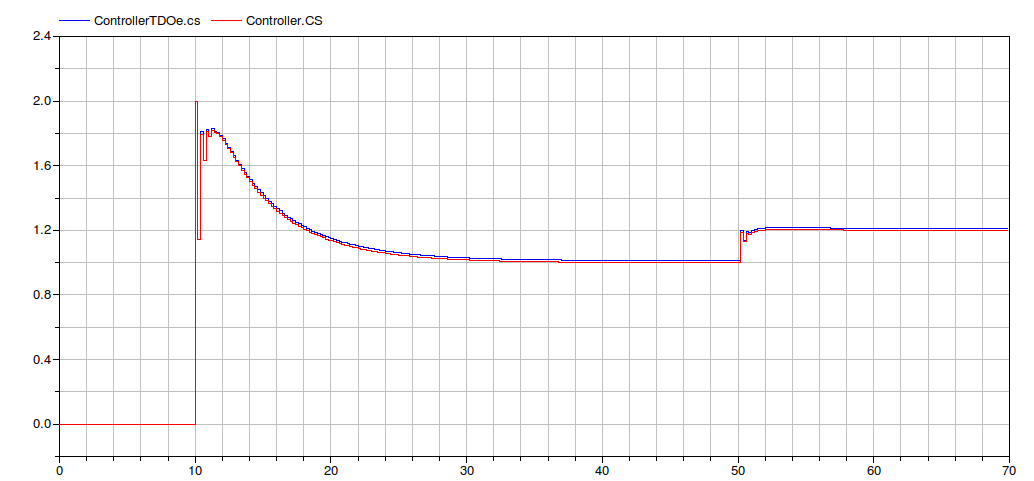
The event based implementation of the digital incremental PID with TDO, reduces the time spent for simulating the model. Here follows the simulation results for the considere examples
Integration started at T = 0 using integration method DASSL
(DAE multi-step solver (dassl/dasslrt of Petzold modified by Dynasim))
Integration terminated successfully at T = 70
CPU-time for integration : 0.12 seconds
CPU-time for one GRID interval: 0.24 milli-seconds
Number of result points : 1748
Number of GRID points : 501
Number of (successful) steps : 7200
Number of F-evaluations : 26592
Number of Jacobian-evaluations: 6373
Number of (model) time events : 649
Number of (U) time events : 0
Number of state events : 0
Number of step events : 0
Minimum integration stepsize : 2.09e-06
Maximum integration stepsize : 0.0993
Maximum integration order : 2