Test of the Proportional + Integral + Derivative controller --
Tracking mode
Description
In this example have been tested the tracking mode of the
proportional + integral + derivative controller.
The process to be controlled has the following transfer
function
Y(s) (1+15s)
---- = ----------------
U(s) (1+10s)(1+2s)
There are two processes:
- with a PID controller,
- and a PID controller with tracking mode
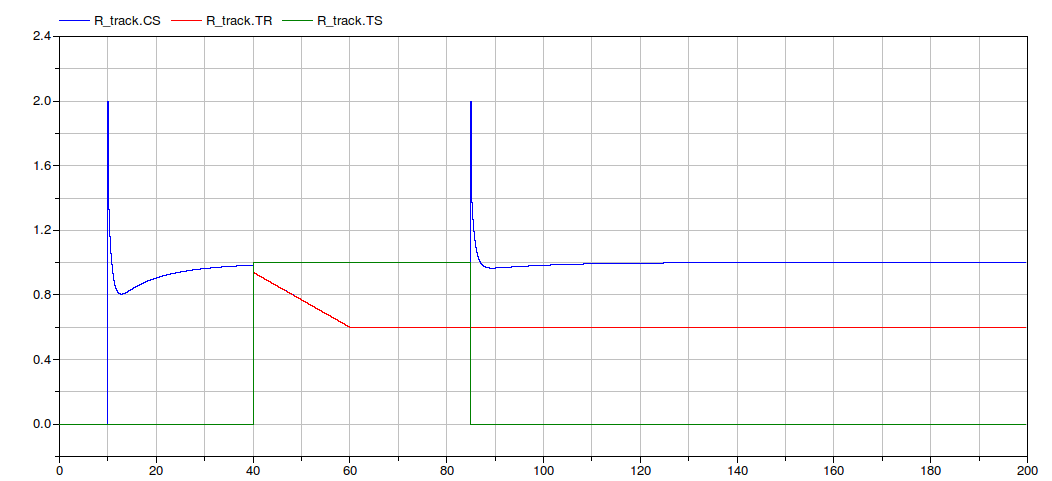
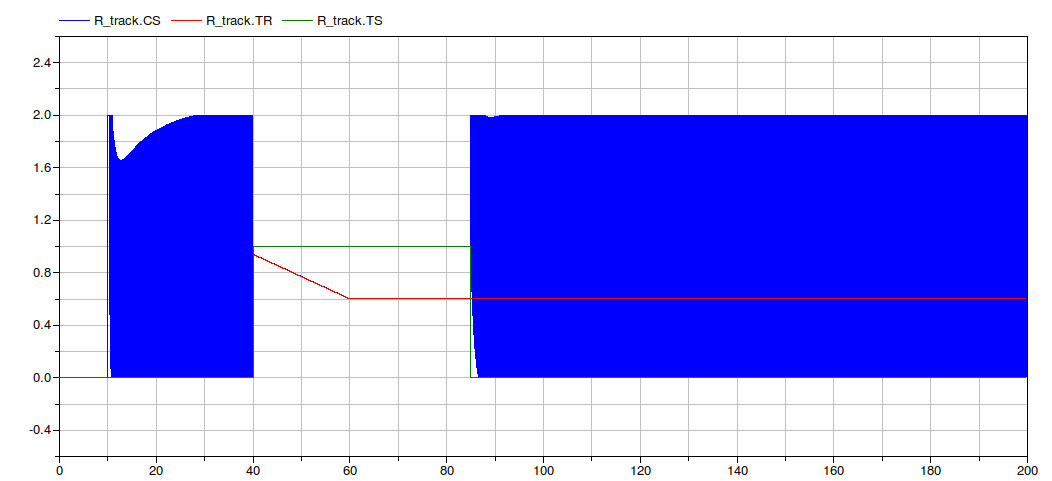
The output signal of the process controlled without tracking is the
red line, while the green line is the output of the process
controlled with the tracking mode.
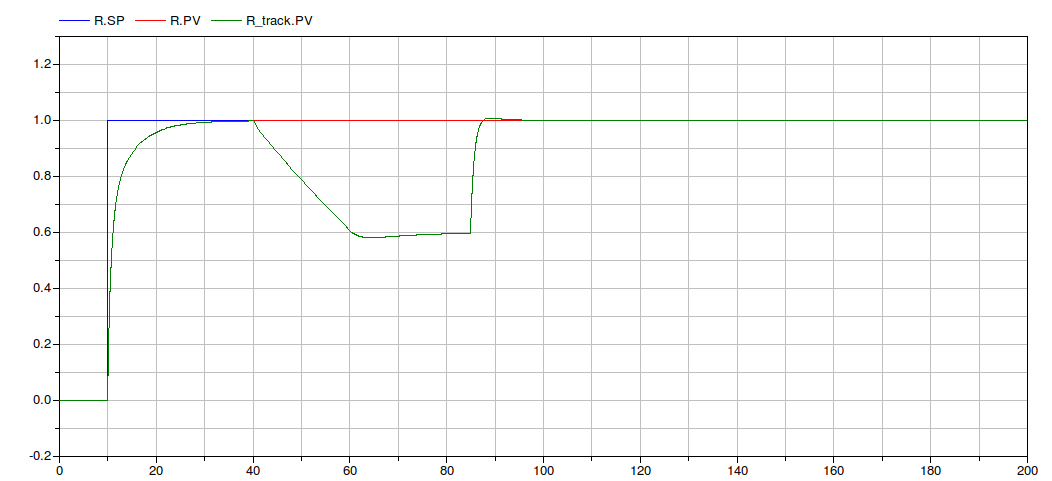
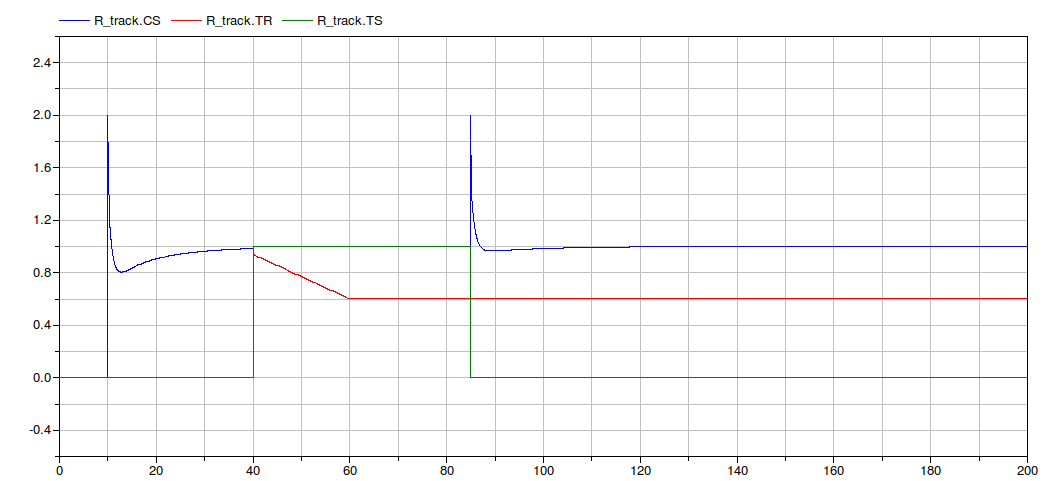
The CS of the controller becomes equal to the track reference
signal TR when the Track Switch signal becomes true.
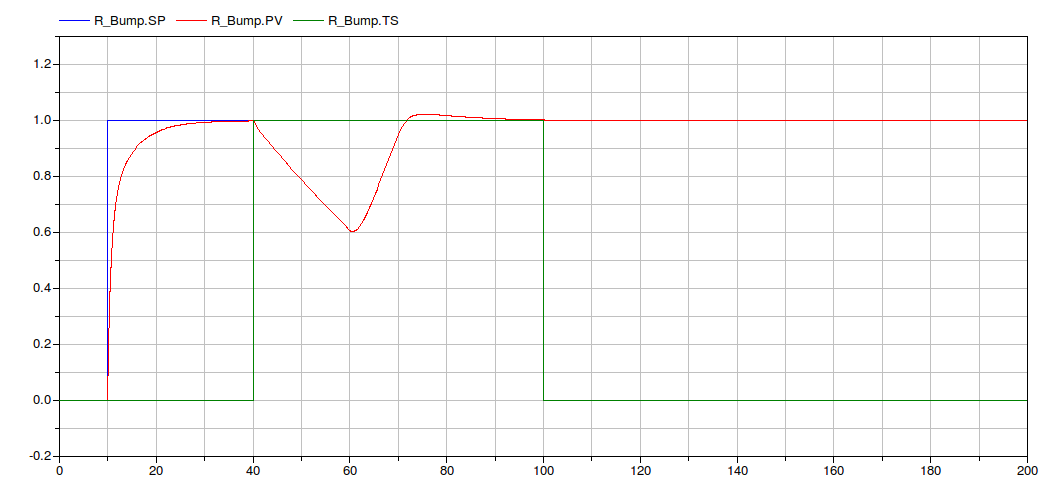
Bumpless transition
If the Track Reference signal moves the Process Variable at the Set
Point reference value, once the Tracking mode is disabled there
should be a bumpless transition. The images below show a bumpless
transition.
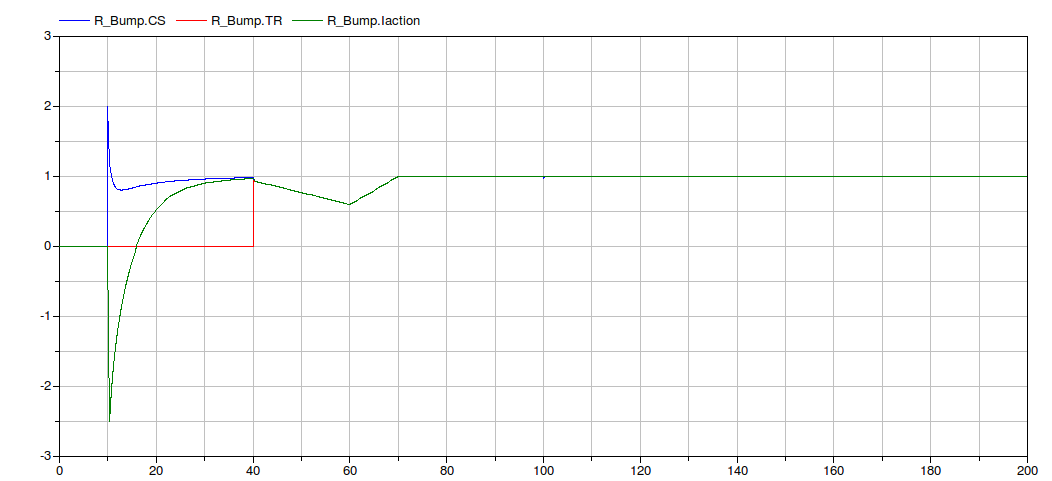
The integrative effect, represented by the integrator in the
feedback path of the PID controller (see the PID block diagram
here), is
forced to follow the tracking reference (Iaction signal in the last
figure). In the same figure there is a small variation of the CS
when the automatic mode start again, because the PV is not exactly
at the SP value and thus the proportional action introduce a little
displacement (the blue line at t = 100).
Discrete time
If the model parameter Ts is
>=0 the continuous time controllers
are replaced by their discrete time versions.
The effect of various discretisation method can be studied.
examples
Ts = 0.01 s and method = BE
Ts = 0.05 s and method = BE
- Industrial Control Systems (v 1.0.0) : April-May 2012
-
- List of revisions:
-
- 11 May 2012 (author: Marco Bonvini)
- Main Authors:
- Marco Bonvini; <bonvini@elet.polimi.it>
- Alberto Leva <leva@elet.polimi.it>
- Politecnico di Milano
- Dipartimento di Elettronica e Informazione
- Via Ponzio 34/5
- 20133 Milano - ITALIA -
- Copyright:
- Copyright © 2010-2012, Marco Bonvini and Alberto
Leva.
- The IndustrialControlSystems package is free
software; it can be redistributed and/or modified under the terms
of the Modelica license.
Generated at 2026-07-21T20:30:55Z by OpenModelicaOpenModelica 1.27.0 using
GenerateDoc.mos