Test of the Proportional controller with bias
Description
In this example have been tested the proportional
controller.
The process to be controlled has the following transfer
function
Y(s) (1+15s)
---- = ----------------
U(s) (1+10s)(1+2s)
There are three processes:
- without controller,
- with a P controller,
- and a P controller with bias signal
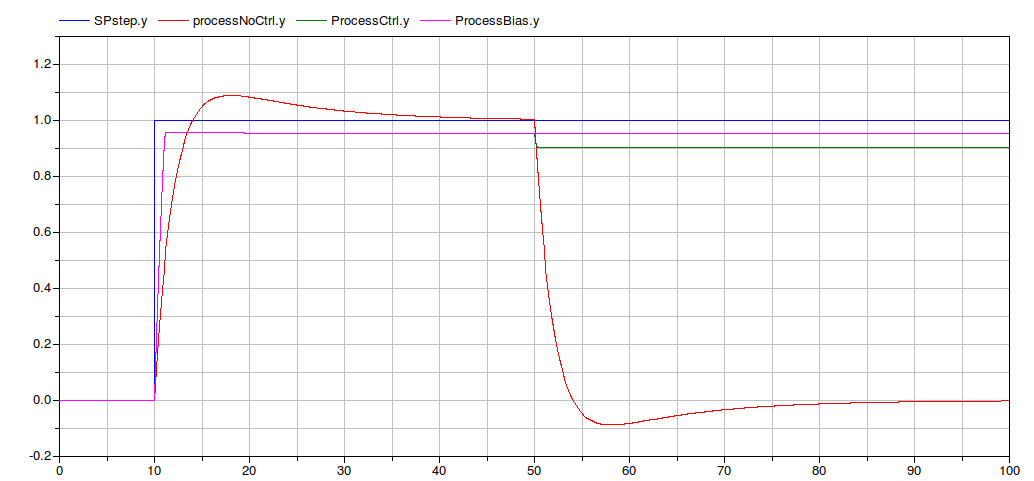
The output signal of the process without control is the red line.
Of course the system performs poorly especially when an external
disturb is applied.
In the closed loop system, the proportional controller tries to
follow the SP with a steady state error that can be reduced by
increasing its parameter Kp. The disturbance can be rejected using
the bias signal of the controller (pink line).
Discrete time
If the model parameter Ts is
>=0 the continuous time controllers
are replaced by their discrete time versions.
The effect of various discretisation method can be studied.
- Industrial Control Systems (v 1.0.0) : April-May 2012
-
- List of revisions:
-
- 11 May 2012 (author: Marco Bonvini)
- Main Authors:
- Marco Bonvini; <bonvini@elet.polimi.it>
- Alberto Leva <leva@elet.polimi.it>
- Politecnico di Milano
- Dipartimento di Elettronica e Informazione
- Via Ponzio 34/5
- 20133 Milano - ITALIA -
- Copyright:
- Copyright © 2010-2012, Marco Bonvini and Alberto
Leva.
- The IndustrialControlSystems package is free
software; it can be redistributed and/or modified under the terms
of the Modelica license.
Generated at 2026-07-21T20:30:55Z by OpenModelicaOpenModelica 1.27.0 using
GenerateDoc.mos