This package contains elementary example models to demonstrate the usage of the MultiBody library
| Model | Description |
|---|---|
|
DoublePendulum DoublePendulumInitTip |
Simple double pendulum with two revolute joints and two bodies.
In DoublePendulumInitTip, the initial position of the pendulum tip
is given instead of common initialization by pendulum angles.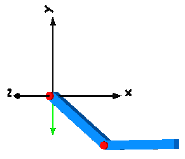
|
| ForceAndTorque | Demonstrates usage of Forces.ForceAndTorque element.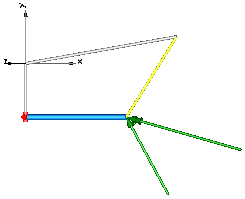
|
| FreeBody | Free flying body attached by two springs to environment.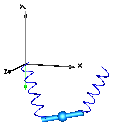
|
| InitSpringConstant | Determine spring constant such that system is in steady state
at given position.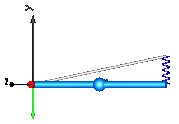
|
| LineForceWithTwoMasses | Demonstrates a line force with two point masses using a
Joints.Assemblies.JointUPS and alternatively a
Forces.LineForceWithTwoMasses component.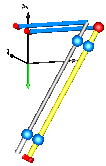
|
| Pendulum | Simple pendulum with one revolute joint and one body.
|
| PendulumWithSpringDamper | Simple spring/damper/mass system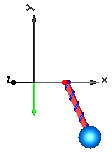
|
| PointGravity | Two bodies in a point gravity field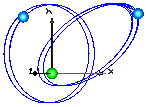
|
| PointGravityWithPointMasses | Two point masses in a point gravity field (rotation of bodies
is neglected)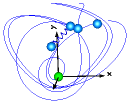
|
| PointGravityWithPointMasses2 | Rigidly connected point masses in a point gravity field
|
| RollingWheel | Single wheel rolling on ground starting from an initial
speed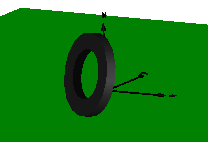
|
| RollingWheelSetDriving | Rolling wheel set that is driven by torques driving the
wheels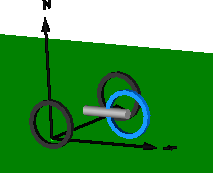
|
| RollingWheelSetPulling | Rolling wheel set that is pulled by a force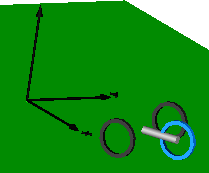
|
| SpringDamperSystem | Spring/damper system with a prismatic joint and attached on
free flying body
|
| SpringMassSystem | Mass attached via a prismatic joint and a spring to the world
frame
|
| SpringWithMass | Point mass hanging on a spring
|
| ThreeSprings | 3-dimensional springs in series and parallel connection
|
| HeatLosses | Demonstrate the modeling of heat losses. |
| UserDefinedGravityField | Demonstrate the modeling of a user-defined gravity field. |
| Surfaces | Demonstrate the visualization of a sine surface, as well as a
torus and a wheel constructed from a surface
|
| Name | Description |
|---|---|
|
|
Simple double pendulum with two revolute joints and two bodies |
|
|
Demonstrate how to initialize a double pendulum so that its tip starts at a predefined position |
|
|
Demonstrate usage of ForceAndTorque element |
| Free flying body attached by two springs to environment | |
|
|
Determine spring constant such that system is in steady state at given position |
|
|
Demonstrate line force with two point masses using a JointUPS and alternatively a LineForceWithTwoMasses component |
| Simple pendulum with one revolute joint and one body | |
|
|
Simple spring/damper/mass system |
|
|
Two point masses in a point gravity field |
|
|
Two point masses in a point gravity field (rotation of bodies is neglected) |
|
|
Rigidly connected point masses in a point gravity field |
|
|
Simple spring/damper/mass system |
|
|
Mass attached with a spring to the world frame |
|
|
Point mass hanging on a spring |
|
|
3-dim. springs in series and parallel connection |
|
|
Single wheel rolling on ground starting from an initial speed |
|
|
Rolling wheel set that is driven by torques driving the wheels |
|
|
Rolling wheel set that is pulled by a force |
| Demonstrate the modeling of heat losses | |
|
|
Demonstrate the modeling of a user-defined gravity field |
| Demonstrate the visualization of a sine surface, as well as a torus and a wheel constructed from a surface | |
| Utility classes for elementary multi-body example models |