This example demonstrates the usage of the control structure template BaseClasses.TwoDOFinverseModelController to control a system by using of an inverse system model in the forward path. The controlled system is a mixing unit described in [1]. See also model of MixingUnit1 for more details.
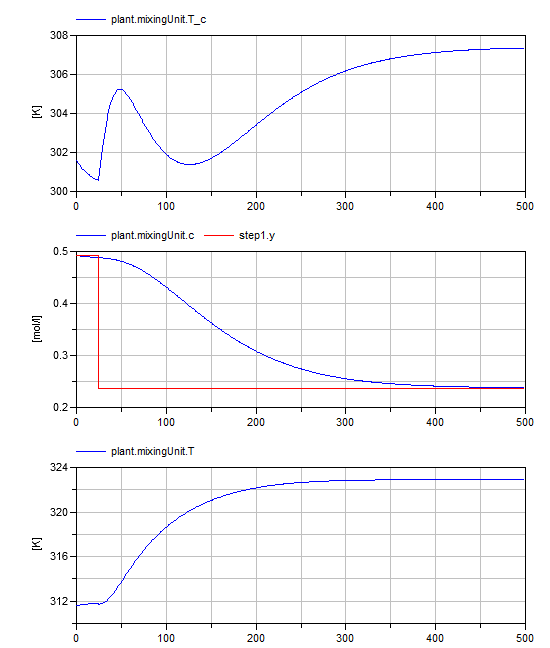
Within Dymola simulation tool the "Commands / Simulate and Plot Results" selection yields the following simulation result.