This package provides input/output blocks where every block is available in a continuous and a discrete (sampled) representation. A block is defined via its continuous parameterization. By specifying a discretization method and a sample time, the discrete representation is automatically derived from the continuous form. The defaults of the most important options for all blocks are set in the global SampleClock component (via inner/outer). As a result, it is, e.g., easy to switch quickly between a continuous and a discrete representation of all blocks of a controller.
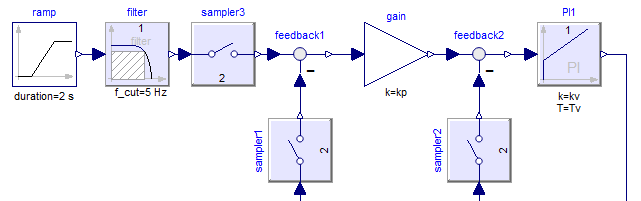
Examples to demonstrate the technique are given in the package Examples. Especially, the continuous or discrete control of a simple flexible drive with a P-PI cascade controller is demonstrated in example SimpleControlledDrive.
| Name | Description |
|---|---|
| Controllers Tutorial | |
| Package of examples to demonstrate the usage of controllers | |
| Global options for blocks of Controller library (in particular sample clock) | |
| Sample the input signal if discrete block or y=u if continuous block | |
| Continuous or discrete state space system block | |
| Continuous or discrete, single input single output transfer function | |
| Continuous or discretized, single input single output block described by a ZerosAndPoles object | |
| Continuous or discretized analog low or high pass IIR-filter (CriticalDamping/Bessel/Butterworth/Chebyshev) | |
| Discrete finite impulse response low or high pass filter | |
| Output the integral of the input signal (continuous or discrete block) | |
| Approximate derivative (continuous or discrete block) | |
| First order (continuous or discrete) transfer function block (= 1 pole) | |
| Second order (continuous or discrete) transfer function block (= 2 poles) | |
| Proportional-Integral controller (continuous or discrete block) | |
| PID-controller in additive description form | |
| P, PI, PD, and PID controller with limited output, anti-windup compensation and setpoint weighting | |
| Delay the input by a multiple of the base sample time if discrete block or y=u if continuous block | |
| Analog to digital converter (including sampler) | |
| Digital to analog converter (including zero order hold) | |
| Increasing the sampling frequency with linear interpolation and optional mean value filtering | |
| Output the product of a gain matrix with the input signal vector. The matrix can be loaded from a file optionally | |
| Block that generates a uniform distributed noise output signal at sample instants if discrete and y=0 if continuous | |
| Luenberger observer for state space systems | |
| Base classes for control plants | |
| Package of interfaces (partial blocks) of controllers | |
| Package of icons of controllers | |
| Package of type definitions | |
| Package of internal utilities of controllers (for advanced users only) |