A controlled crane crab
A simple PID (actually PD) controlles the pendulum into upright
position.
Selected continuous time states
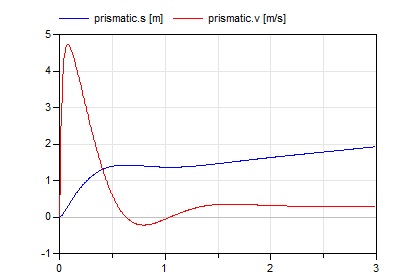
- actuatedPrismatic.s
- actuatedPrismatic.v
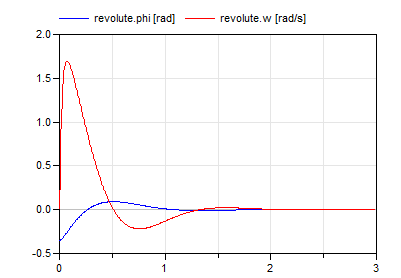
- actuatedRevolute.phi
- actuatedRevolute.w
- PID.D.x
- PID.I.y
 Developed 2010 at the DLR Institute of System
Dynamics and Control
Developed 2010 at the DLR Institute of System
Dynamics and Control
Generated at 2026-07-26T20:40:21Z by OpenModelicaOpenModelica 1.27.0 using
GenerateDoc.mos