This example contains an algebraic loop. A non-linear system must be solved for initialization and at simulation.
In this version, the state are manually selected.
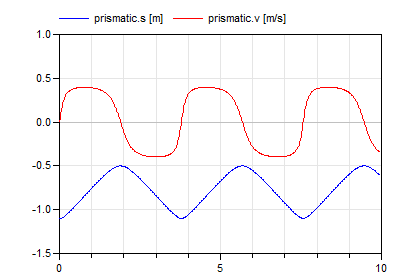
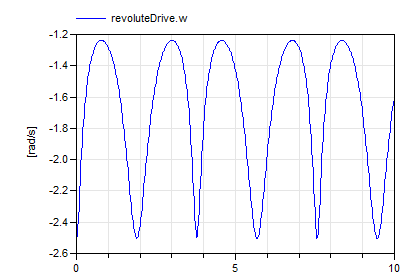
Selected continuous time states
![]() Developed 2010 at the DLR Institute of System
Dynamics and Control
Developed 2010 at the DLR Institute of System
Dynamics and Control