A piston engine
This example contains an algebraic loop. A non-linear system
must be solved for initialization and at simulation.
This version does not stipulate the state selection
Selected continuous time states
- There are 2 sets of dynamic state selection.
- From set 1 there is 1 state to be selected from:
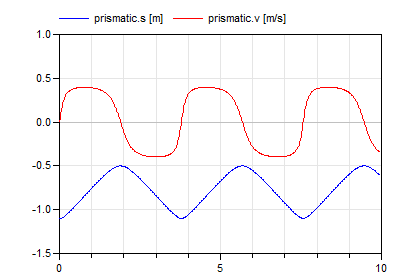
- prismatic.s
- revoluteDisc.phi
- revolutePiston.phi
- From set 2 there is 1 state to be selected from:
- prismatic.v
- revoluteDisc.w
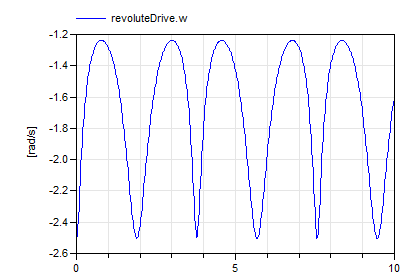
- revoluteDrive.w
 Developed 2010 at the DLR Institute of System
Dynamics and Control
Developed 2010 at the DLR Institute of System
Dynamics and Control
Generated at 2026-07-26T20:40:21Z by OpenModelicaOpenModelica 1.27.0 using
GenerateDoc.mos