A pendulum mounted on an ideal rolling wheel
This model contains non-holonomic constraints.
Selected continuous time states
- body1.frame_a.phi
- body1.r[1]
- body1.w
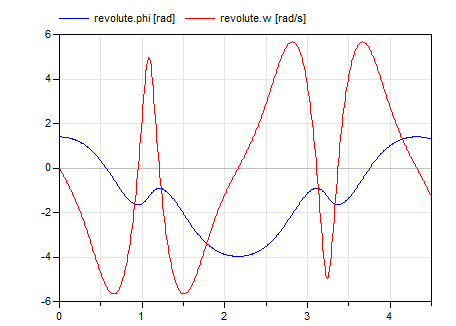
- revolute.phi
- revolute.w
 Developed 2010 at the DLR Institute of System
Dynamics and Control
Developed 2010 at the DLR Institute of System
Dynamics and Control
Generated at 2026-07-26T20:40:21Z by OpenModelicaOpenModelica 1.27.0 using
GenerateDoc.mos