The 3 signals of the force
connector contain force and torque. The first and second signal are
interpreted as the x- and y-coordinates of
a force and the third is torque, acting at
the frame connector to which frame_b of this component
is attached. Note that torque is a scalar quantity, which is
exerted perpendicular to the x-y plane.
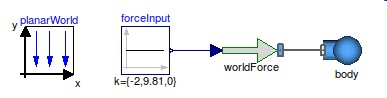
An example of this model is given in the following figure:
The parameter resolveInFrame defines in which frame the input force shall be resolved.
![]() Developed 2010 at the DLR Institute of System
Dynamics and Control
Developed 2010 at the DLR Institute of System
Dynamics and Control