Driveline Tutorial
Tutorial - Defining a new driveline model
The following process will demonstrate how to create a new
driveline model using these interface definitions. This tutorial
will guide you through building a driveline for
a passenger car, i.e. a vehicle with 4 wheels.
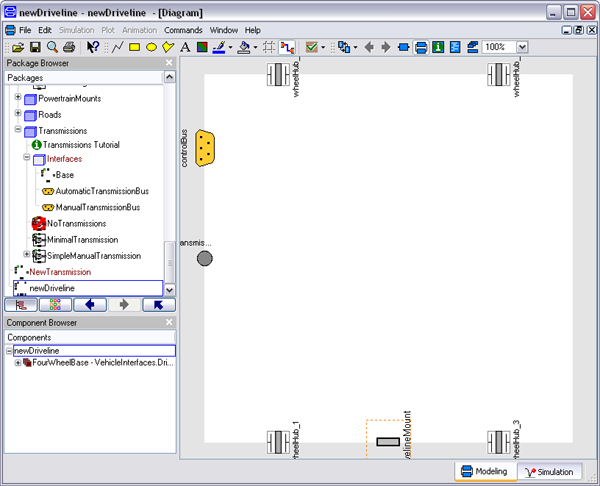
- Create a new model that extends
VehicleInterfaces.Drivelines.Interfaces.TwoAxleBase,
it should look like this:
- In the component browser, right click on Base
and select Parameters from the context menu to
produce the following parameter dialog
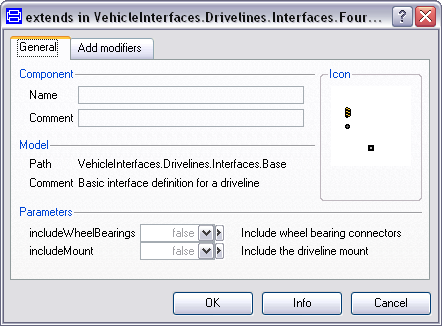
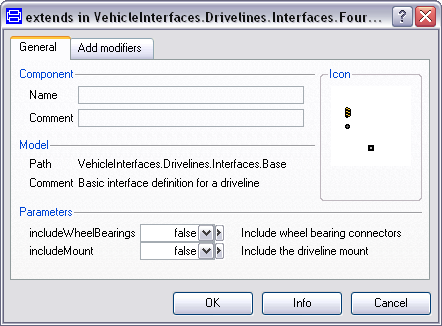
- This dialog allows you to enable/disable the optional
connections by setting includeWheelBearings and
includeMount as required for your new driveline
model. The wheelHub connectors are of the type
Modelica.Mechanics.MultiBody.Interfaces.FlangeWithBearing, the
parameter includeWheelBearings controls whether
the bearing connectors within the wheelHubs is enabled or not.
- You can now define your driveline model as required
Creating a simple rear-wheel drive example
The following steps demonstrate how to create a simple
rear-wheel drive driveline model. The driveline model will transmit
the torque from the transmission to the rear wheels via
a propshaft, differential with final drive and then two
halfshafts. No torque reaction in to the transmission housings will
be modelled.
Starting from step 3 above.
- First, decide which of the optional connectors are required in
the model. For this example we don't need any of the optional
connections
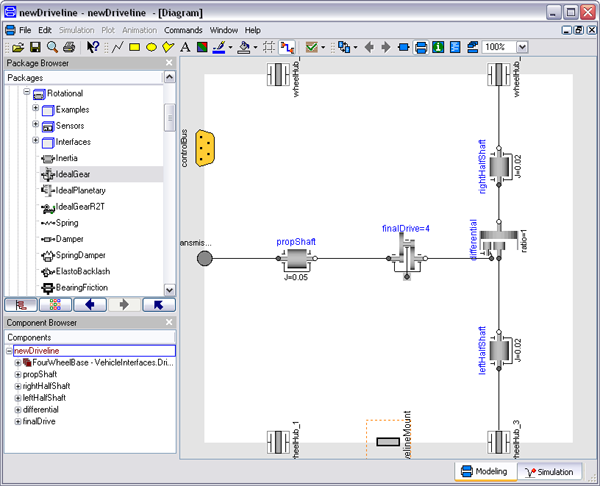
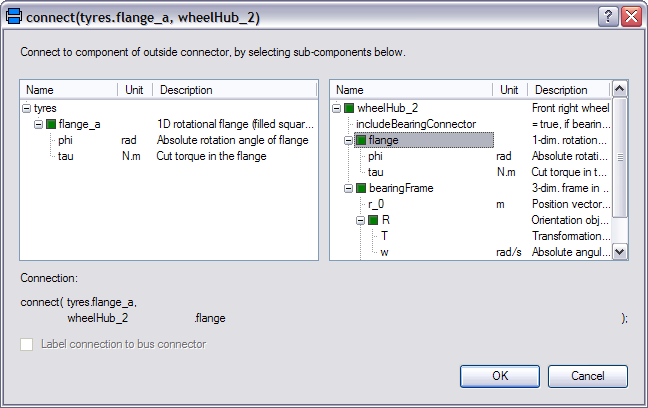
- Add the following blocks and connections to the diagram. When
you draw the connections from the rightHalfShaft and leftHalfShaft
components to the wheelHub connectors the dialog box shown below
will appear asking which connector within the wheelHub connector
you would like to make the connection to. As we are modelling the
driveline as a 1D system you should select
flange from the list of options which is the 1D
connector within the wheelHub connector.
- Next, we need to check to see if any connections to the control
signal bus are required for the driveline, see here for
a complete list of the minimum connections required. In this
case we don't need to add any signals to the control signal
bus.
- The model is now complete and should check successfully and can
be used in any model compatible with the VehicleInterfaces library
assuming the selected Driver model also uses the accelerator pedal
connection
Generated at 2026-06-23T20:19:05Z by OpenModelicaOpenModelica 1.26.9 using
GenerateDoc.mos