This basic sensor is aimed to be used within advanced sensors where the cut-torque acting between the two frames is determined to which this model is connected. This cut-torque is provided at the output signal connector torque (= frame_a.f). If parameter positiveSign = false, the negative cut-torque is provided (= frame_b.f).
Via parameter resolveInFrame it is defined in which frame the torque vector is resolved:
| resolveInFrame = Types.ResolveInFrameA. |
Meaning |
|---|---|
| world | Resolve vector in world frame |
| frame_a | Resolve vector in frame_a |
| frame_resolve | Resolve vector in frame_resolve |
In this basic sensor model, the connector frame_resolve is always enabled and must be connected. If resolveInFrame = Types.ResolveInFrameA.frame_resolve, the vector torque is resolved in the frame to which frame_resolve is connected.
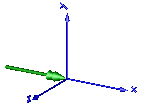
In the following figure the animation of a CutTorque sensor is shown. The dark blue coordinate system is frame_b, and the green arrow is the cut torque acting at frame_b and with negative sign at frame_a.