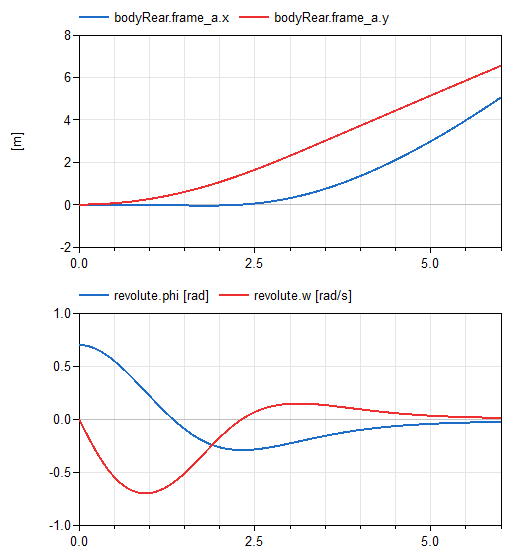
An ideal rolling single track model of a car. There is dynamic state selection applied. It might be avoided by picking Rear.v_long as state.
Developed 2010 at the DLR Institute of System Dynamics and Control