Double track model
A double track model of a car.
Selected continuous time states
- actuatedRevolute.phi
- actuatedRevolute.w
- body.v[1]
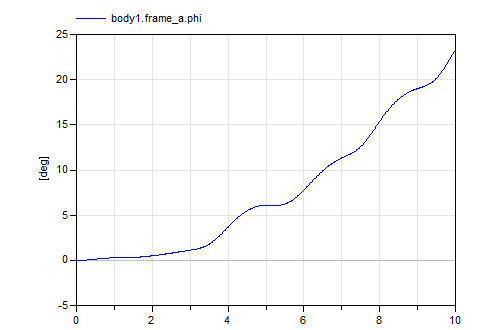
- body1.frame_a.phi
- body1.r[1]
- body1.r[2]
- body1.w
- body2.v[2]
- inertia.phi
- inertia.w
- inertia1.phi
- inertia1.w
- inertia2.phi
- inertia2.w
- inertia3.phi
- inertia3.w
 Developed 2010 at the DLR Institute of System
Dynamics and Control
Developed 2010 at the DLR Institute of System
Dynamics and Control
Generated at 2026-07-26T20:40:21Z by OpenModelicaOpenModelica 1.27.0 using
GenerateDoc.mos