The purpose of this model is to determine de workspace and possible trayectory of the mechanism. The parameters used are located in the record. This parameters are used as the parameters of each component as needed.
The Workspace2d generates references values between the ranges of the joints feasible motion. This values are then introduced into Angular position sources (from MSL ) and then connected to the RR component.
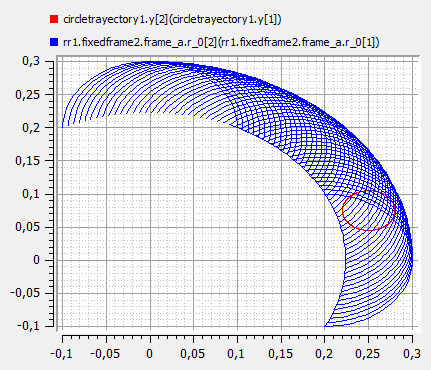
The simulation results in parametric plot are: