URDFModelica is a library to convert robot designs into multibody simulation models based on the Unified Robot Description Format URDF, see ROS 2 Documentation and ROS Wiki.
Many CAD software have functionalities to export their models as URDF file, an XML file with known convention and markings, that define properties of links and joints. A Python script in this library's resources converts the URDF file to packages of Modelica files: parameter records and models for links and joints, overall models that connect the links and joints together.
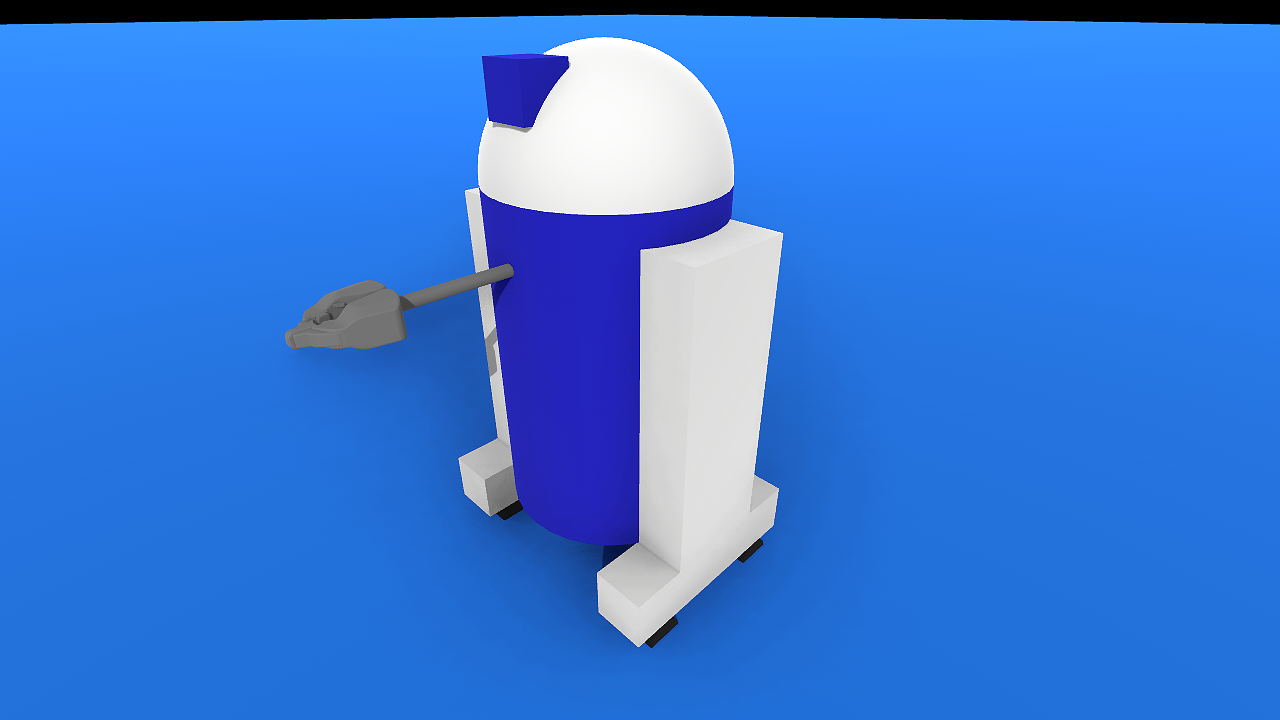
An example mobile robot comes along the library 07-physics.urdf.
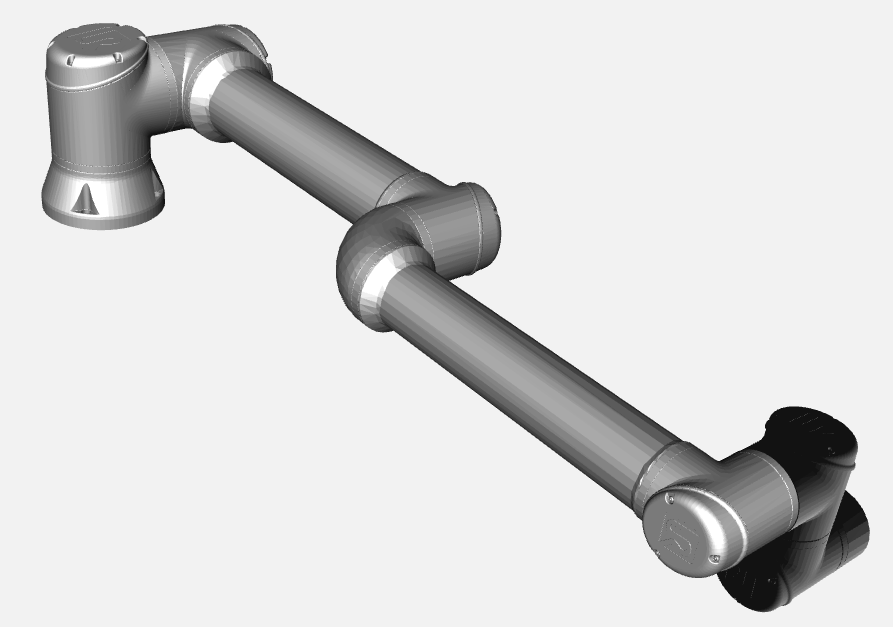
An example stationary robot comes along the Library UR10e and ur10e.urdf Copyright Universal Robots 2025.
Visualization can be done in two ways, with visualizers from the Standard Library or using the DLR Visualization 2 library, the free community edition suffices to run the examples. Which to use must be selected by the users on package creation.
| Name | Description |
|---|---|
| Copyright and License | |